

1. 서론
터널 굴착 공법은 크게 발파공법으로 대표되는 재래식 터널 공법과 기계를 이용해서 굴착하는 기계화 시공법으로 분류된다(ITA, 2000; KICT, 2015). 전단면 터널 굴착기(Tunnel Boring Machine, 이하 TBM)가 사용되는 TBM 터널 굴착 공법은 대표적인 기계화 시공법의 한 종류이며, TBM의 굴착은 TBM 본체로 부터의 추력을 디스크 커터(disc cutter)나 커터 비트(cutter bit) 등의 각종 굴착 도구에 전달시켜 지반에 압입시키고 커터헤드(cutterhead)를 회전시킴으로써 굴착이 이루어진다. ITA(2000)에서는 쉴드(shield)의 유무, 굴착 중의 지보 방법, 굴진에 필요한 반력을 얻는 방법 등에 따라 TBM의 종류를 분류하고 있으며, 토압식(Earth Pressure Balance, 이하 EPB)은 대표적인 쉴드TBM 중 하나이다. 토압식 쉴드TBM공법은 커터헤드 배면에 위치한 챔버의 토압을 사용하여 굴진면의 안정성을 유지하면서 터널을 굴착하는 공법이다(Lee et al., 2017b). 최근 들어 토압식 쉴드TBM은 벤토나이트 등의 첨가제를 활용한 굴착 토사 개량 기술의 발전으로 기존의 연약 지반 뿐만 아니라 다양한 지반조건에서도 원활한 굴착이 가능해졌으며(Herrenknecht, 2018), 유럽이나 아시아 국가를 중심으로 도심지 건물 밀집지역의 지하 터널과 같이 높은 안전성과 고속시공이 필수적으로 요구되는 터널 공사에 많이 적용되는 추세이다.
터널 기계화 시공을 위해서는 최적의 TBM을 선정하는 것이 중요한데 이를 위해서는 사전에 현장 조건에 따라 TBM의 굴착 성능을 예측하는 것이 매우 중요하다(KICT, 2015; Lee et al., 2017a; Lee et al., 2017b). 토압식 쉴드TBM의 굴착 성능을 예측하는 연구는 대부분 실내 시험(Shi et al., 2011; Gharahbagh et al., 2013; Pelia et al., 2013)과 현장 굴진 자료 분석(Maidl, U. and Comulada, M, 2011; Copur et al., 2014; Amoun et al., 2017; Bandini et al., 2017; Avunduk and Copur, 2018)을 통해 수행된다. 근래에 들어 컴퓨터 성능의 향상으로 개별요소법(Discrete Element Method, DEM)에 기반한 지반 모델링을 통해 토압식 쉴드TBM의 굴착 성능을 접근하는 방법이 시도되고 있다(Maynar and Rodríguez, 2005; Wu et al., 2013; Wu and Liu, 2014; Lee et al., 2017a; Lee et al., 2017b).
Maynar and Rodríguez(2005)는 서로 다른 물성을 갖는 6가지 토층으로 구성된 복합 토사 지반 환경을 구성한 후, 직경 약 9.4m 크기의 토압식 쉴드TBM을 굴진하는 수치 모델링을 통해 굴진 시 발생하는 커터헤드면의 토크, 소요 추력, 단위 시간당 배토량 등을 평가하였다. 해당 연구에서는 지반 환경 구성에 필요한 입자 수를 최대한 감소시키고 해석 속도를 높이기 위해 입자 요소에 대해 클럼프 모델을 사용하여 단위 입자 크기가 다소 크다는 한계가 있었으며(d=600mm), 원통형으로 모델링된 TBM은 실제 TBM 형상과 비교해 지나치게 단순화시킨 상태로 해석하였다. Wu et al.(2013)은 베이징 지하철 공사의 특정 구역에 적용된 직경 6m급 토압식 쉴드TBM을 대상으로 토크 및 소요 추력, 단위 시간당 배토량 뿐만 아니라 각각의 굴착 도구에 작용하는 힘, 막장압과 챔버내 압력 등 TBM 굴진에 있어서 검토되는 다양한 요소를 산정하는 연구를 수행한 바 있다. 또한, TBM이 투입된 굴착 지반과 유사한 지반 환경을 구성하였고, 해석 후 현장 굴진 데이터와의 비교를 통해 검증하는 작업까지 수행하였다. 하지만 DEM 해석상의 어려움으로 인해 연구에서 제시한 굴진 거리는 6cm여서 연속적으로 운영되는 TBM의 특성 상, 결과를 일반화하기에는 한계가 있었다. 최근에 Lee et al.(2017a)와 Lee et al.(2017b)은 직경 약 6∼7m 중단면급 스포크형(spoke-type) 및 면판형(face plate) 토압식 쉴드TBM의 굴진성능을 예측하기 위한 연구를 수행한 바 있다. TBM 굴진은 지반뿐만 아니라 장비의 거동까지 함께 고려되어야하므로, Lee et al.(2017a)와 Lee et al.(2017b)는 추후 다물체 동역학과 유한요소법 소프트웨어와의 연계 해석이 필요하다고 밝힌 바 있으나 두 연구 모두 예비 및 초기단계 수준으로 접근하였으므로 해석에 사용된 토사 지반의 검증이 제대로 이루어지지 못했다는 한계점을 보였다.
본 연구에서는 일련의 선행연구(Lee et al., 2017a; Lee et al., 2017b) 과정의 다음 단계로써, DEM 기법을 활용하여 직경 7.73m 중단면급 토압식 쉴드TBM의 굴진 성능을 예측하기 위한 연구를 수행하였다. 먼저, 실제 토압식 쉴드TBM이 공사가 진행되었던 공사구역에서 풍화토 지반의 일부분을 선정한 후, 선정된 지반과 유사한 설계지반정수를 갖도록 토사 지반 모델을 구현하였다. 그리고 실제 토압식 쉴드TBM 형상의 경우, 도면 정보를 바탕으로 3D 모델링 작업을 수행하였으며, 모델링 된 TBM과 구현한 토사 지반 모델을 결합하였다. 마지막으로 굴진 조건 등의 TBM 운영 조건을 부여하여, 해석을 통해 굴진 시 커터헤드면 및 장착되는 위치별 굴착 도구에서 측정되는 힘과 토크를 중점적으로 평가하고 수치 모델의 적용성을 검토하였다.
2. 수치해석 모델
2.1 지반 모델
토사 지반 모델 조성을 위해 시공이 완료된 서울 지하철 ○○○공구 중 일부 쉴드TBM 터널 구간을 대상 지반으로 선정하였다. 터널이 통과하는 구간의 토피고는 약 15m이고, 지반은 풍화토로 구성되어있다. 수치 해석을 위해 선정된 본 구간 주변 풍화토층의 설계 강도 정수는 Table 1과 같으며 해석 구간의 지반 조건은 Fig. 1과 같다.
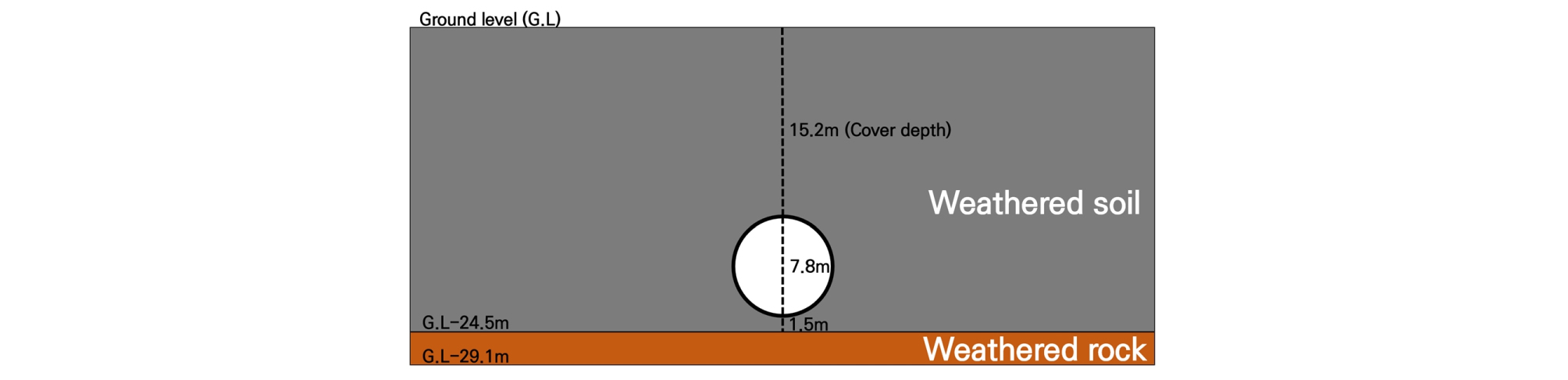
Table 1. Range of design strength parameter for weathered soil in selected site
| Property | Value |
| Density (kN/m3) | 19.5 |
| Cohesion, c (kPa) | 26.3 |
| Internal friction, Φ (°) | 27.3 |
토사 지반의 설계 강도 정수인 전단강도를 모사하기 위해, 대형 직접전단시험 모사를 통해 굴착 대상 지반과 유사한 토사 지반 모델을 구현하고자 필요한 DEM 기본 물성값을 도출하였다. DEM의 특성상 해석에 사용된 입자의 크기와 종류, 접촉 조건에 따라 같은 지반 물성에서도 다르게 나타나기 때문에 검증과정이 반드시 요구된다. DEM 해석에서 해석 대상 영역이 크고 복잡하여 입자의 개수와 접촉 영역이 많을 경우, 해석 시간이 급증하게 되고 수렴이 힘들어지는 문제를 갖기 때문에 해석에 적합한 입자 조건을 먼저 고려해야 한다. 예컨대, 입자의 지름을 작게 고려하면 상대적으로 해석의 정확도는 높일 수 있으나, 계산에 걸리는 해석 시간이 과도하게 증가한다. 이와는 반대로, 해석 시간 단축을 위해 입자의 지름을 크게 선정 할 경우, 본 연구에서 고려하는 TBM 굴착 시 입자가 주어진 형상에 원활히 접촉하지 못하는 경우가 발생하기 때문에 사전에 입자 크기에 대한 충분한 고려가 예비 해석 과정을 통해 수반 되어야 한다(Lee et al., 2017b). 본 연구의 경우, DEM 해석을 통해 지반을 모델링하는 것과 함께 TBM 형상에 대한 굴착 모사 과정을 수행해야하기 때문에 해석에 사용된 입자의 크기는 TBM 개구부를 통해 충분히 통과가 가능해야 하며 커터헤드면이나 스크류 오거로 모사되는 형상에서 원할히 입자간 또는 면간 접촉이 유지되는 크기로 고려되어야 한다. Wu et al.(2013)은 직경 6.14m, 두께 2m인 원통형 지반을 형성하기 위해 직경 100mm 단일 입자 20,715개를 사용한 바 있다.
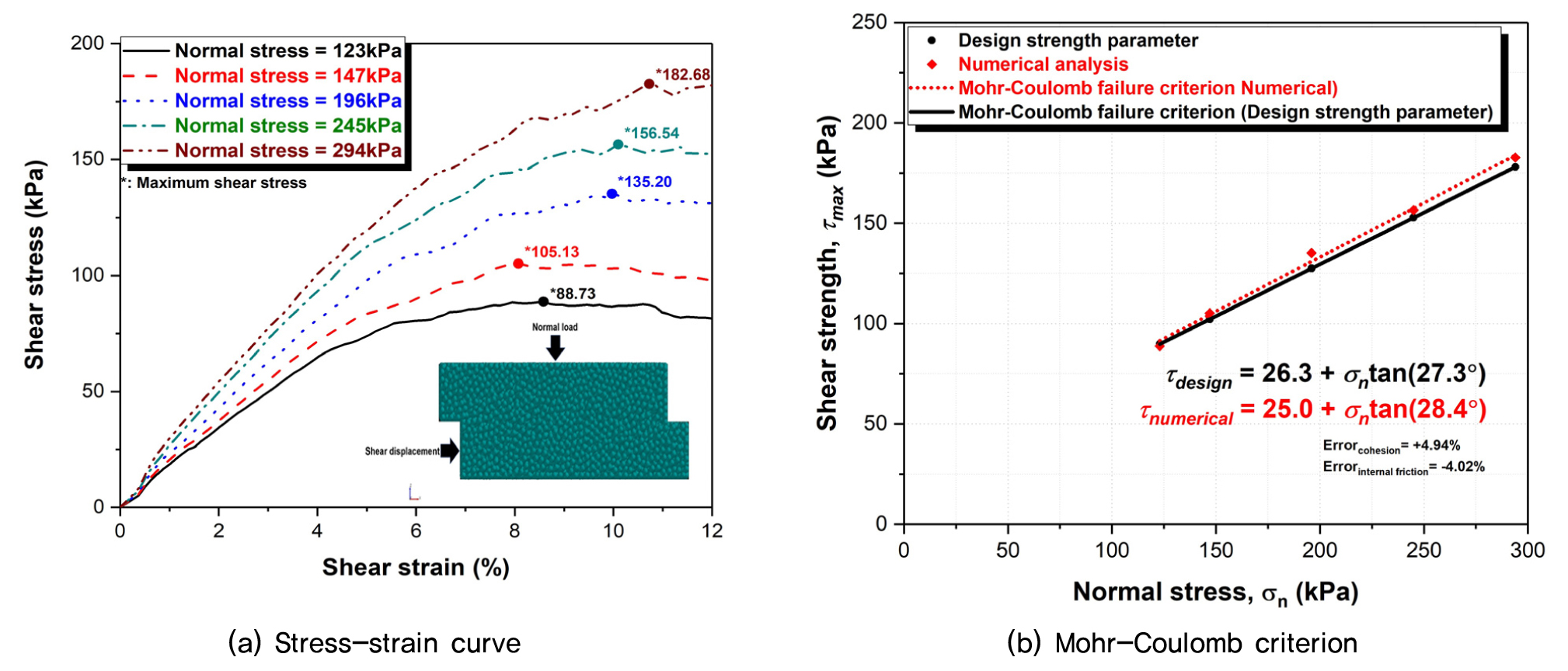
본 연구에서는 토사 지반을 모델링하기 위한 입자간 접촉 특성을 산정하기 위해 직접전단시험을 모사하는 과정을 거쳤으며 이를 통해 입자간 접촉 물성과 단위 입자의 물성을 검토하였다. 토사 지반 모델에 사용된 입자는 TBM 굴진 대상 지반의 크기를 고려하여 직경이 100mm인 단일 구형(single sphere) 입자를 선정하였다. 이는 TBM 형상에서 구현된 개구부의 최대 거리가 약 400mm이므로 최대 4개의 입자가 이를 통해 통과할 수 있도록 한 것이다. 또한, 입자와 입자가 접촉할 때 발생하는 접촉력을 계산하기 위한 접촉 모델로 비선형탄성모델(Non-linear elastic model)인 Hertz-Mindlin 접촉 조건을 사용하였으며, 해석에 적용된 입자와 접촉 물성은 Table 2에 정리하였다. 3차원 대형 직접전단시험 모사에는 총 25,789개의 단일 구형 입자가 사용되었으며, 마찰이 없는 면으로 이루어진 상하부 대형전단박스는 각각 4m(가로) × 4m(세로) × 0.75m(높이) 크기로 모사되었다. 해석 시간을 고려하여 직접전단시험에서 수평력을 가하기 위한 전단 속도는 0.01m/s로 제어하였으며 이때 주어진 수직응력 조건은 각각 123, 147, 196, 245, 294kPa으로 사용하였다. 해석적으로 생성된 전단박스 안의 입자들이 대상 지반의 단위중량(19.5kN/m3)을 갖도록 생성된 입자의 간극률(0.44)을 고려하여 입자밀도는 3,537kg/m3을 사용하였다.
Table 2. DEM parameters for particle and particle-particle properties

Fig. 2(a)는 수치해석을 통해 입력된 수직응력 조건에서 직접전단시험의 전단응력과 전단변형률 관계를 나타낸다. 주어진 지반정보에서 직접전단시험의 결과와는 비교하기 어렵기 때문에 해석을 통해 산정된 수직응력과 이때의 최대 전단응력을 사용하여 전단강도식과 비교하였다. 분석 결과, 실제 시험과 마찬가지로 수직 응력이 증가함에 따라 최대 응력이 증가하는 것을 확인할 수 있으며, 모든 수직응력조건에서 최대 전단응력(전단강도)은 약 10% 전단변형률 근방에서 발현되는 것으로 파악 되었다(Fig. 2(a)). 전단강도로 표현되는 강도정수인 점착력과 내부마찰각은 직접전단에서의 수직응력 조건과 주어진 수직응력 조건에서 도출된 최대 전단응력 값을 통해 구할 수 있다. Table 1 에 제시된 풍화토층의 점착력 및 내부마찰각과 해석을 통해 각각의 수직응력조건에서 도출된 최대 전단응력을 동일한 Mohr-Coulomb 파괴 포락선 형태로 산정하여, 수치해석에서 모사된 입자 구성이 연구에서 선정한 풍화토 지반을 구현하는지 평가하였다. 분석 결과, Table 2에 제시된 입자 물성치를 기반으로 모델링된 토사 지반의 설계 강도 정수는 실제 대상 지반의 설계 강도 정수와 5%이내의 상대오차를 보이는 것으로 나타났다(Fig. 2(b)).
2.2 굴착 대상 지반 모델
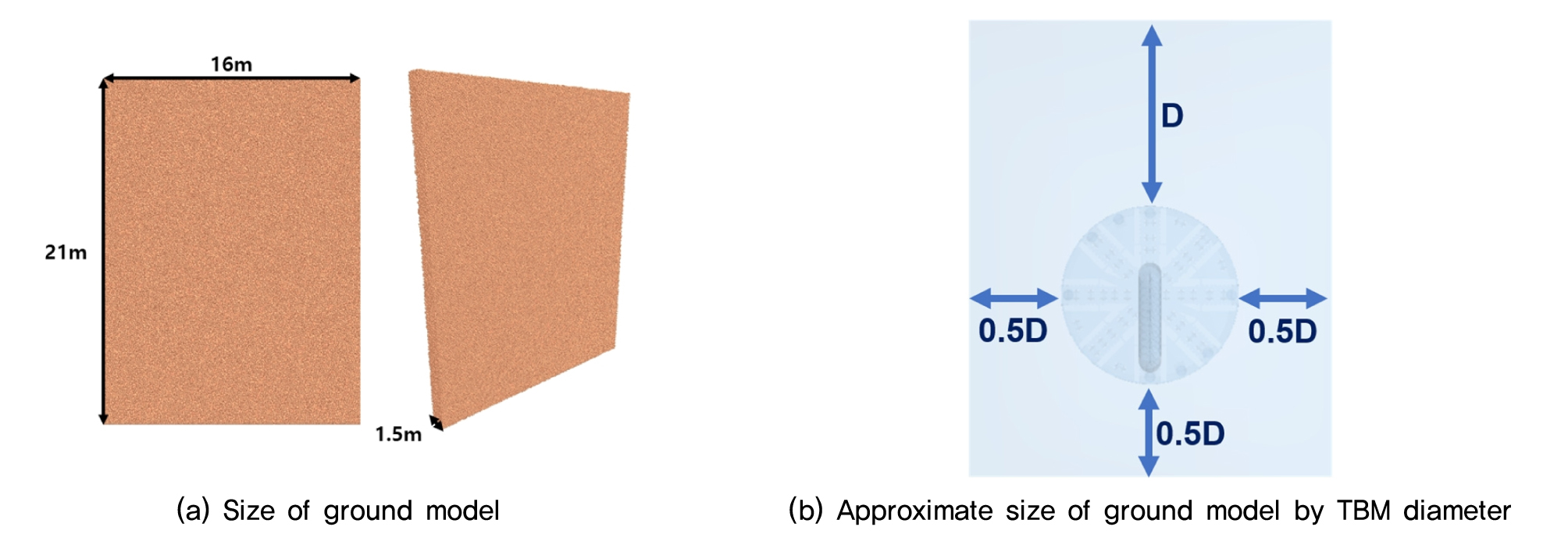
3차원 직접전단시험 해석에 사용된 동일한 입자 생성 조건과 접촉 조건을 기반으로, 약 520,000개의 입자를 생성시킨 후, 단순 중력에 의한 적층을 통해 약 16m(가로) × 21m(세로) × 1.5m(두께) 크기를 갖는 토사 지반을 조성하였다(Fig. 3(a)). 이후 현장 심도에서의 수직응력을 구현하기 위해 상부에 상재압을 추가로 가하였다. 굴진과정에서 입자의 손실로 인하 침하가 발생할 수 있는 굴진면 상부를 제외한 나머지 하부 및 측면에 있는 입자는 해석에 큰 영향을 주지 않기 때문에(Lee et al., 2017a; Lee et al., 2017b) 토사 지반 조성 과정에서 굴진면 상부로 표현되는 토피고는 커터헤드 직경 만큼의 길이를 사용하였으며(1D), 나머지 영역은 커터헤드 직경의 1/2배 길이로 모사하여 해석의 정확도를 유지함과 동시에 해석 영역 축소를 통해 전체적인 해석 시간을 단축시키고자 하였다(Fig. 3(b)).
2.3 TBM 모델링
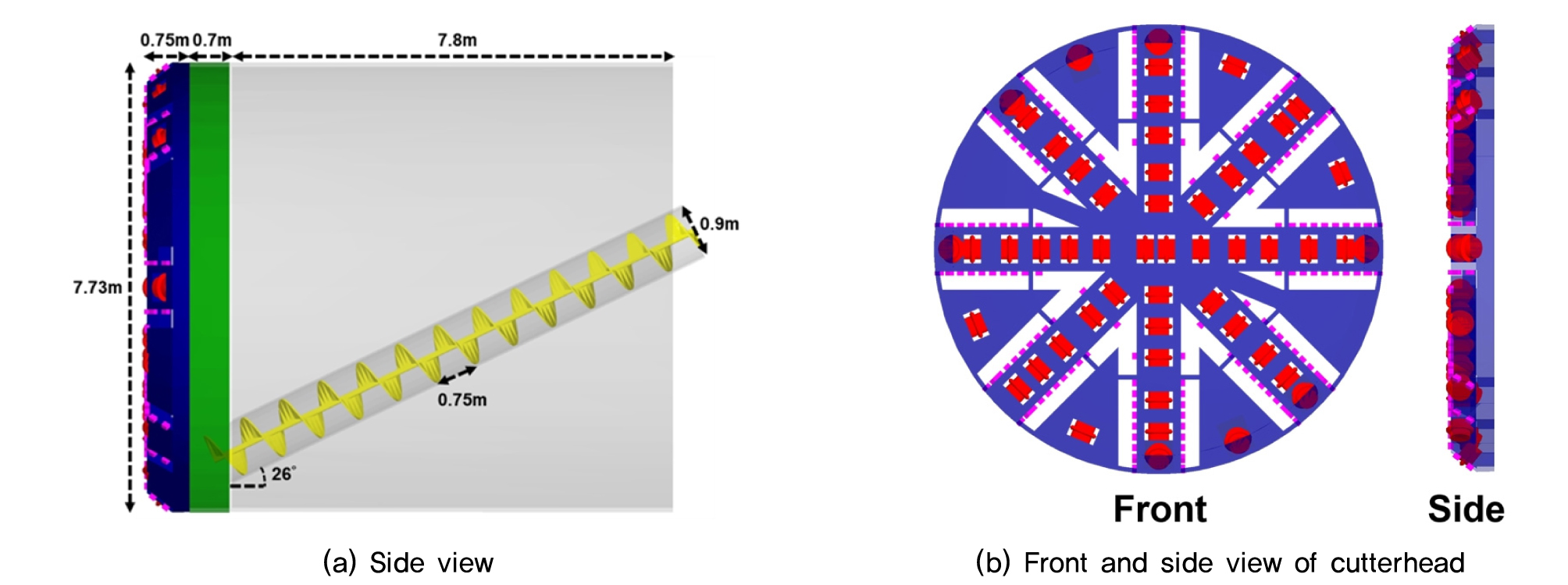
본 해석을 위해 적용된 실제 중단면 토압식 쉴드TBM 모델은 일본에서 제작된 직경 7.73m 면판형 토압식 쉴드TBM이다. 커터헤드의 스포크 개수는 8개이며, 커터헤드면에서 토사가 챔버내로 통과할 수 있도록 커드헤드면의 열린 부분의 비율인 개구율은 약 21.31%이다. 또한, 커터헤드에는 52개 디스크 커터와 167개 커터비트가 굴착 도구로 장착되어 있으며, 게이지 커터가 장착된 커터헤드면의 바깥쪽은 굴곡진 형태를 보인다(Fig. 4). 이러한 복잡한 형태의 형상을 모두 해석상에 고려하기는 어렵기 때문에, 커터헤드면의 세부 굴곡 등은 단순화 하되, 디스크 커터의 위치나 개구율, 크기와 전체적인 형상은 실제 TBM 형상에 가깝도록 모델링 하였다.
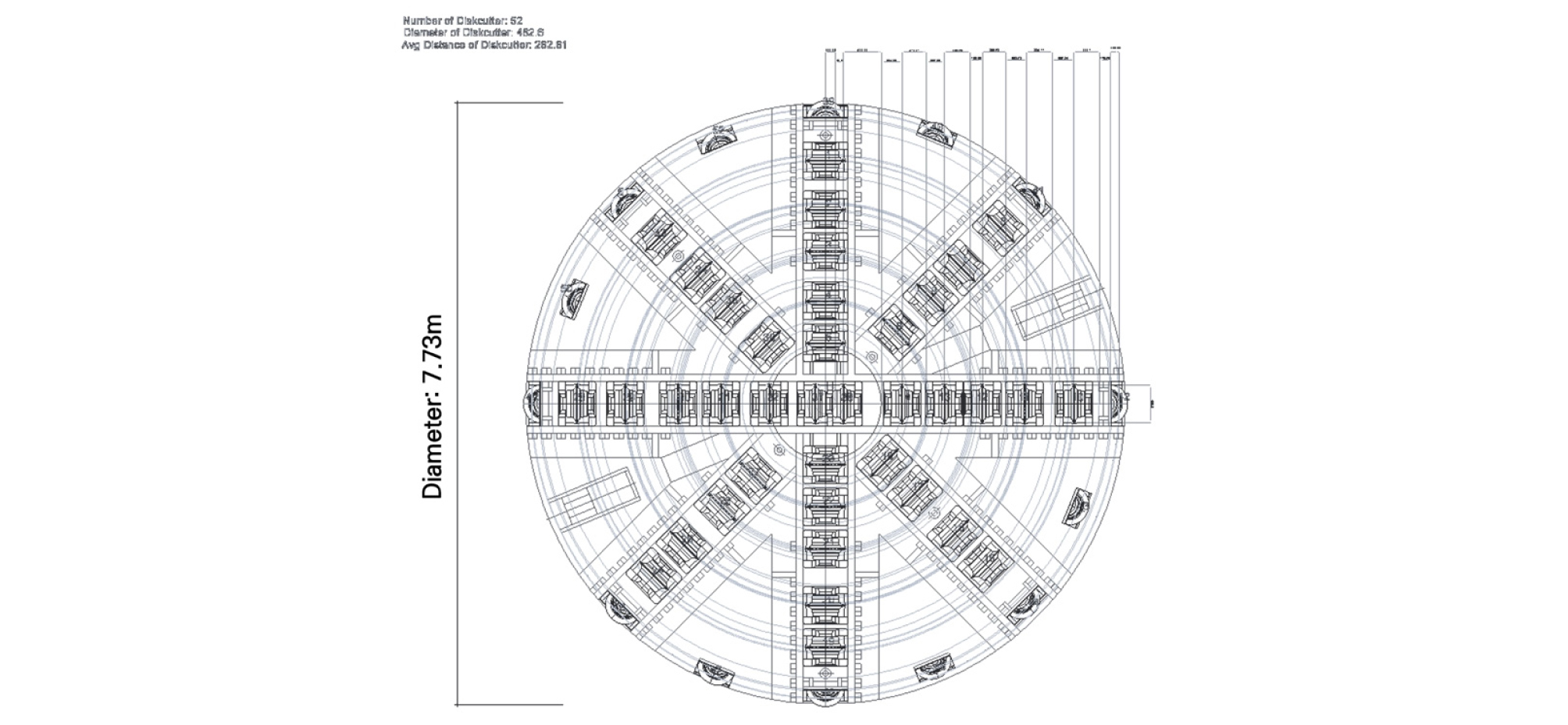
Fig. 5는 Fig. 4를 바탕으로 작성된 수치해석 형상을 나타낸다. TBM 해석 모델은 결과 검토와 해석의 편의를 위해 커터헤드면, 굴착 도구, 쉴드, 스크류 오거로 나누어 모델링 되었다. 선행연구(Lee et al., 2017a; Lee et al., 2017b)에서는 고려하지 않았던 EPB 쉴드TBM의 챔버 영역까지 추가하여 총 6개 영역으로 구성된 TBM 형상을 작성하였다. 또한, 각각의 굴착 도구를 전부 독립적으로 작성하여, 해석 후 각 굴착 도구에 작용하는 하중 및 토크에 대해서도 상세하게 검토해 볼 수 있도록 하였다. 챔버 하단에 설치된 스크류 오거의 설치 각도는 26도이며 피치 간격은 0.75m, 직경 0.9m인 형태로 작성하였다. 커터헤드면, 챔버, 쉴드의 길이는 각각 0.75, 0.7, 7.8m이다.
굴진 시, 매 시간마다 회전 및 병진 운동하는 TBM 장비와 토립자로 표현되는 입자 사이의 접촉을 통해 TBM 형상과 입자간 접촉면에서 반력이나 토크 등이 계산된다. TBM 형상과 토립자 사이의 접촉 물성에 따라 TBM 형상에 가해지는 힘이 다르게 계산될 수 있으며, 이러한 차이는 해석에 사용된 입자 수 및 형상, 크기 등에 따라 다르게 나타난다. 하지만 본 연구에서는 TBM 형상면과 토립자 사이의 접촉 물성에 대해서 TBM 장비가 일반 강재로 제작되었다는 가정으로 Ucgul et al.(2014)가 각종 실험을 통해 도출한 일반 강재와 모래 사이의 접촉 물성을 해석에 적용하였다. 즉, 본 연구에서 고려한 DEM 해석에서 TBM 형상에 변형은 발생하지 않으며 형상에 접촉하는 입자와 TBM 형상 간의 접촉 거동을 통해 TBM 형상에서 발생한 반력 등을 검토하여 굴진과정을 모사한 것이라고 할 수 있다. Table 3은 TBM 형상과 입자 사이의 접촉 물성을 정리한 것이다.
Table 3. DEM parameters for TBM and TBM-particle properties (Ucgul et al., 2014)
3. TBM 굴착과정 모사
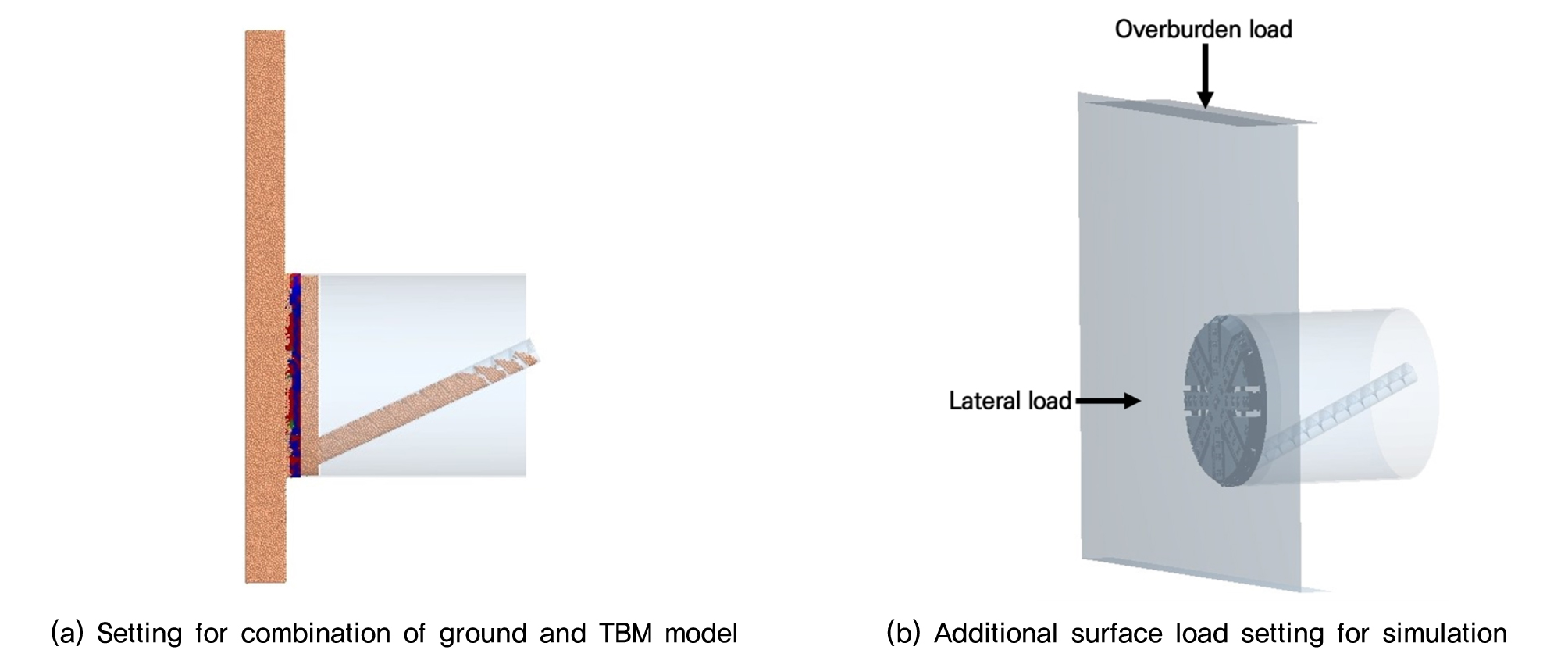
굴진 해석을 위해 TBM 형상을 조성된 토사 지반 모델과 결합하는 것이 필요하다. 이는 연속적인 굴착과정에 관한 해석 결과 도출과 해석 시간 단축뿐만 아니라 해석 초기에 발생할 수 있는 비정상적 거동을 사전에 방지하기 위해, 지반 내부로 TBM을 1cm 관입시키고 커터헤드와 챔버 영역과 스크류 오거에 입자를 가득 채운 후에 굴진을 진행하고자 하였다(Fig. 6(a)). 즉, 이는 해석을 시작하는 단계에서부터 굴진이 진행되고 있는 상태의 조건으로 해석을 수행하기 위함이다.
Fig. 2에도 제시된 바와 같이, 해석을 위해 선정된 대상 터널 구간의 토피고는 약 15m이다. 하지만 본 연구에서는 해석 시간을 고려하여 토사 지반 모델의 크기를 최소화하였으며, 결과적으로 실제 터널 구간의 토피고와 비교해 약 7∼7.5m 정도의 상재 하중 차이가 발생하는 것으로 나타난다. 따라서 대상 터널 구간의 상재하중을 모사하기 위하여 토사 지반의 상부에 servo-control 응력면을 적용하여 일정 상재하중을 추가로 모사하도록 하였다(Fig. 6(b)). 또한, 수평 토압에 대해서도 계산된 상재하중에 따라 수평면으로 하중이 작용되도록 적용하였다.
TBM 장비를 구성하는 요소의 운동은 각각 병진 운동과 rpm으로 표현되는 회전 운동으로 나타낼 수 있다. 본 연구에서는 선행연구(Lee et al., 2017a; Lee et al., 2017b)와 동일하게 TBM 장비를 구성하는 모든 요소의 병진 운동 조건을 공통으로 커터헤드 1회전 당 10mm씩 전진하는 10mm/revolution로 설정하였으며, 추가로 실제 TBM 제원을 참고하여 커터헤드 및 굴착 도구에는 3rpm, 배토를 위한 스크루 오거에는 12rpm 회전 운동 조건을 적용하였다(Table 4).
Table 4. Motion conditions of TBM parts during its advance
4. 해석 결과 및 분석
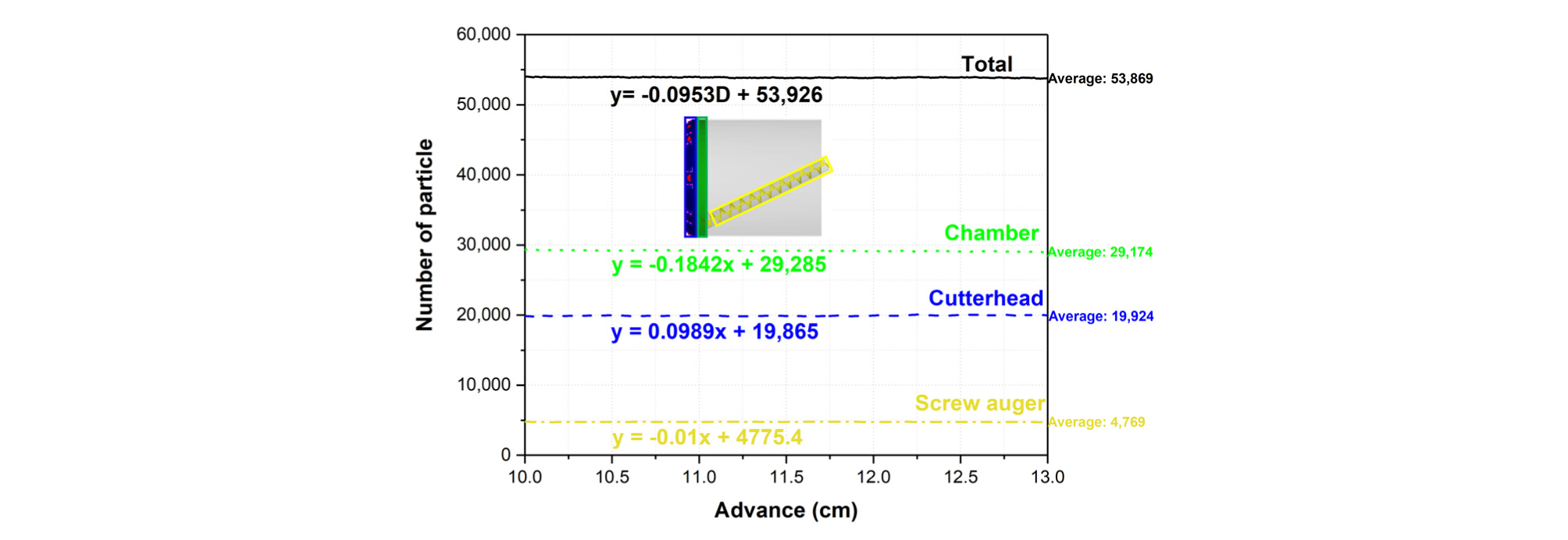
전체 해석 시간은 약 320초이며, 해석 시간동안 주어진 굴진 조건에서 커터헤드는 약 16번을 회전하였고 커터헤드가 회전하는 동안 TBM은 14.8cm를 굴진하였다. 본 연구의 목적은 입자로부터 TBM 형상에 가해지는 외력을 평가하여 전체적인 TBM 장비의 굴진 성능을 예측하는 데에 있다. 지반구성이 일정하고 커터헤드면의 회전과 추력이 일정하게 주어진 조건의 해석이기 때문에 일정 시간이 지난 후에는 해석결과가 범위내로 수렴하는 모양을 보이게 된다. Fig. 7은 굴진 모사 중 측정한 각 부분별 입자의 개수로 해석이 진행됨에 따라 각 파트에 존재하는 입자의 개수가 그림에 나타난 기울기와 같이 조금씩 감소하는 경향을 보이고 있으나 전반에 걸쳐 일정한 상태로 유지되는 것을 알 수 있다. 이를 통해 해석 초기 단계에서부터 굴진 과정이 진행되고 있는 중간 단계로 모사하기 위해 필요한 영역에 입자를 채워 해석을 수행한 조건이 굴진과정 중인 상태를 모사하는 방법에 있어서 해석 시간을 고려할 때 합리적인 방법인 것을 알 수 있다. TBM으로 모사된 형상에는 굴진과정에서 평균적으로 53,869개의 입자가 존재하며 이 중 챔버에는 29,174개가 평균적으로 존재한다.
스크류 오거를 통해 배출되는 입자는 대략 초당 30개정도로 무게를 환산할 경우, 약 95.42kg/s이다(Fig. 8). 토압식 쉴드TBM의 경우, 첨가재를 통한 굴착면의 압력을 유지하면서 굴착이 진행되고 스크류 오거를 통한 토사의 배출을 통해 챔버압을 조절하기 때문에 스크류 오거의 회전 속도를 조절하는 것이 중요하게 여겨진다. 본 해석 조건에서는 회전 속도가 주어진 스크류 오거를 통해 일정한 배토가 이루어지도록 조건을 부여하였고 지반의 구성도 변화가 없기 때문에 챔버압 등의 굴진 결과값이 일정하게 유지되었다고 판단된다. 스크류 오거의 마모 관련 설계에 활용되는 스크류 오거 내부의 토크를 측정한 결과 평균적으로 주어진 조건에서 524kN・m로 나타났다(Fig. 9). 이는 향후 스크류 오거의 마모와 관련된 해석에서 스크류 오거의 피치 간격, 직경, 설치 각도에 따라 대상 지반의 특성을 함께 적용하여 검토가 가능할 것으로 판단된다.
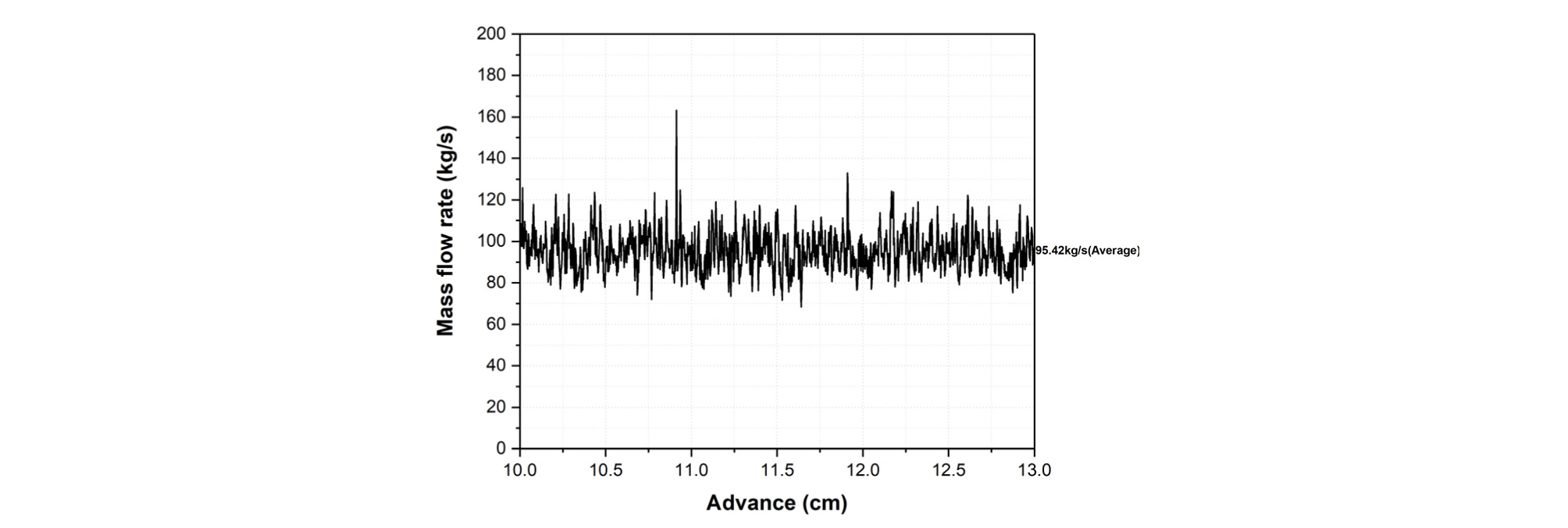
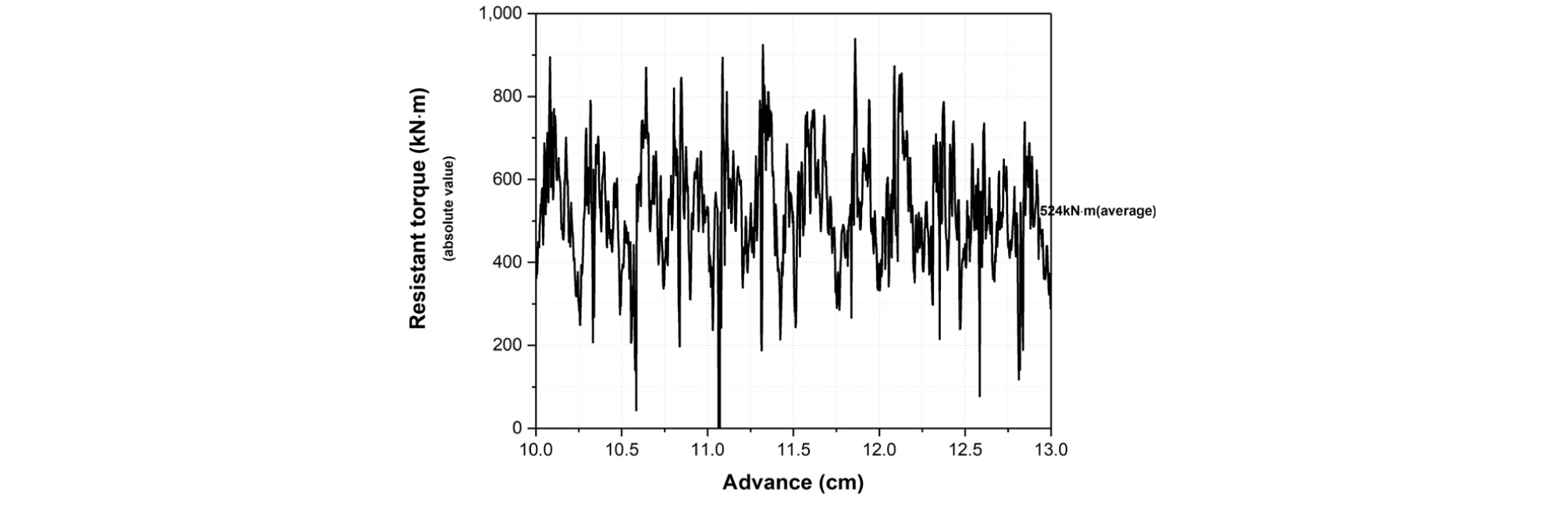
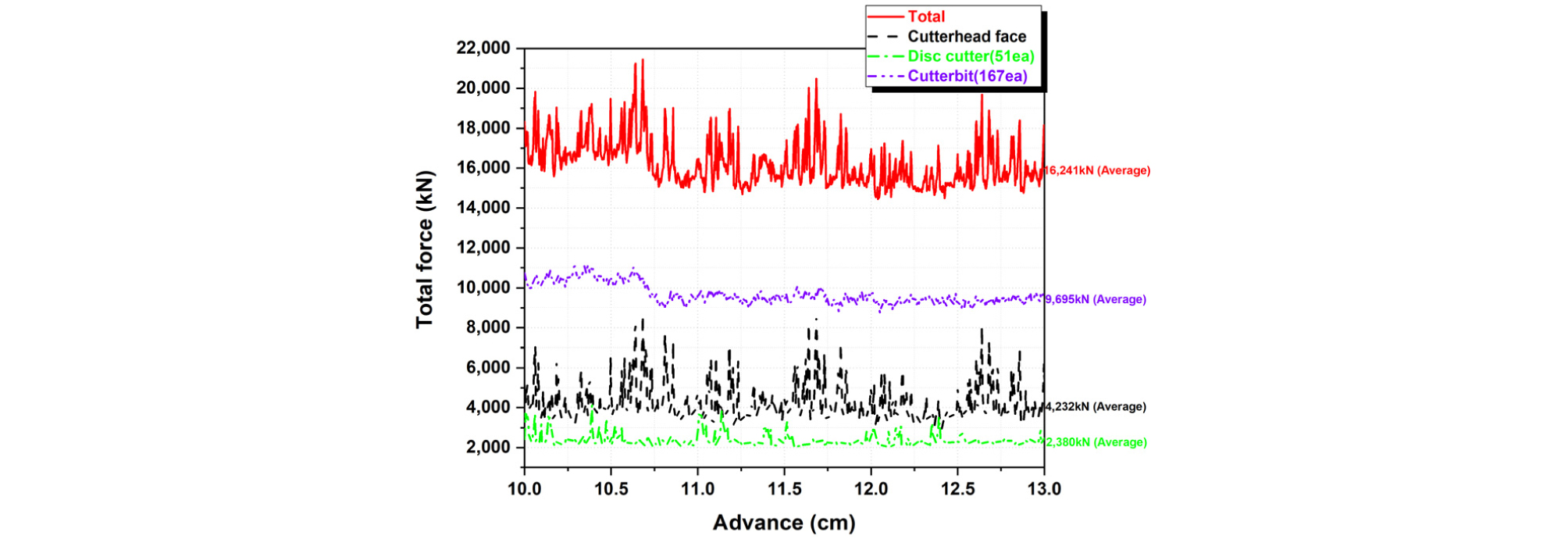
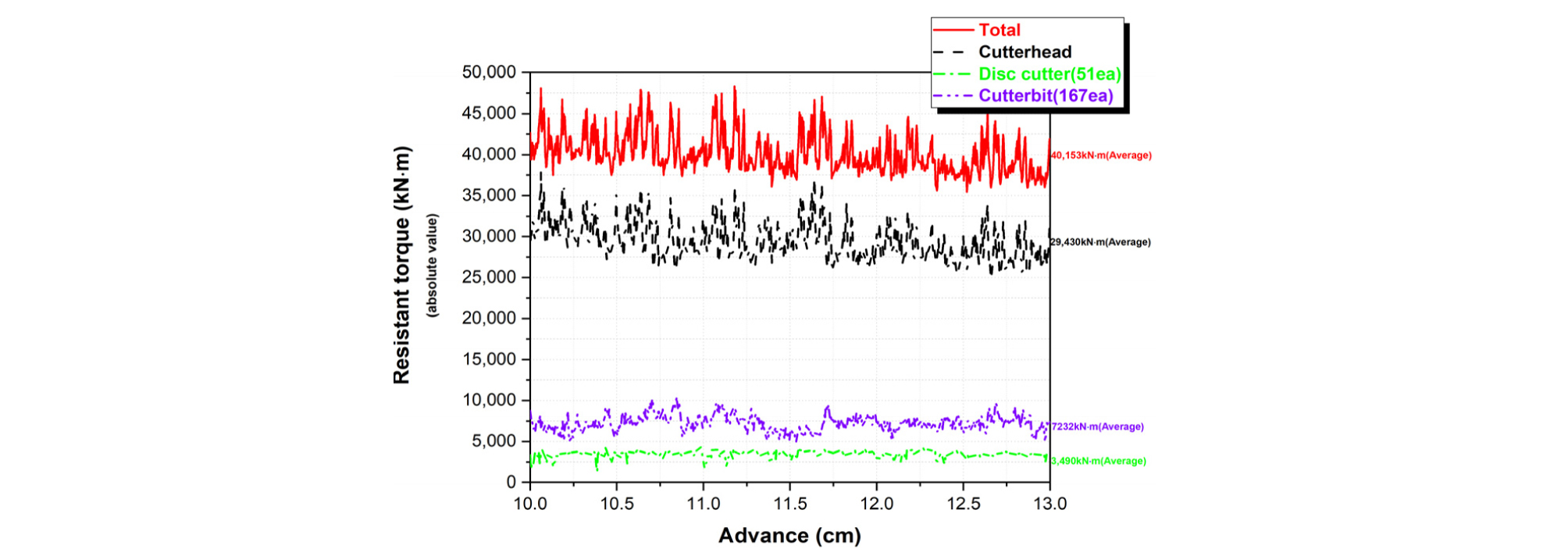
Fig. 10은 굴진과정에 나타나는 커터헤드면의 반력을 나타낸다. 커터헤드면에 발생하는 반력은 주어진 굴진 조건에서 평균적으로 16,242kN으로 나타났다. 커터헤드에 장착된 디스크 커터, 커터 비트와 면으로만 이루어진 부분을 나누어 검토해 봤을 때, 디스크 커터에 가장 큰 반력이 발생하였으며 커터 비트에 평균 2,380kN으로 가장 낮게 발생하였다. 이는 주어진 추력에 의해 강제적으로 굴진이 모사되는 조건에서 커터헤드면에 가장 돌출된 부분인 디스크 커터 부분이 가장 큰 힘을 받고 있는 것으로 판단된다. Fig. 11은 굴진 중 커트헤드면에 발생한 토크를 나타낸다. 토크의 경우에서는 디스크 커터에 발생하는 값이 가장 낮게 나타났으며 디스크 커터와 커터 비트가 설치되지 않은 면에서 가장 큰 토크가 발생한 것으로 나타났다. 굴진 중 나타난 커터헤드면 토크의 평균값은 40,153kN・m로 나타났으며 디스크 커터에서 가장 낮은 값인 3,490kN・m이 나타났다.
Figs. 12와 13은 굴진과정 중에 나타난 각 디스크 커터별로 측정된 반력과 토크의 평균값을 표시한 것이다. 디스크 커터에 작용하는 힘은 디스크 커터의 교체 시기와 연관된 지표로 TBM 운영 시 교체 시기를 결정하는 중요한 요소로 다뤄진다. 일반적으로 커터에 작용하는 평균적인 힘이 큰 경우 커터의 교체 시기가 일찍 도래하므로 과도한 힘이 작용되지 않으면서 굴착량을 확보하는 것이 필요하다. 디스크 커터에 작용하는 힘이 크고 회전에 의해 굴진거리별 회전거리가 증가할 때 디스크 커터의 마모 정도가 상대적으로 높아진다. 즉, 커터헤드면에 설치된 디스크 커터의 위치에 따라 1회전에 따른 회전 거리가 다르게 나타나므로 디스크 커터의 설치 위치에 따른 반력을 살펴보는 것이 필요하다고 할 수 있다. 이를 위해 커터헤드면의 중앙에서부터 디스크 커터가 설치된 반경별로 8개 구간으로 나누고 해당 거리에 포함되는 디스크 커터의 반력의 평균을 산정하였다. 그림에 함께 나타난 커터헤드 색깔별로 연구에서 고려한 반경을 표시하였다. 중앙에 병렬로 설치된 2개의 디스크 커터를 시작으로 25∼50cm 간격으로 분할하였다. 검토 결과, 가장 큰 반력과 토크가 관찰된 영역은 게이지 커터(커터헤드면의 바깥쪽 굴곡진 부분) 앞 부분으로 해당 범위는 커터헤드 중앙에서부터 3.2∼3.5m 반경에 해당하는 부분이다. 디스크 커터별로 상대적으로 반력이 크게 측정된 부분은 해석 모델에서 설정한 개구부가 큰 부분의 근처와 게이지 커터 인근에서 관찰되었다. 이는 토크의 평균값을 표시한 Fig. 13에서도 확인할 수 있다.
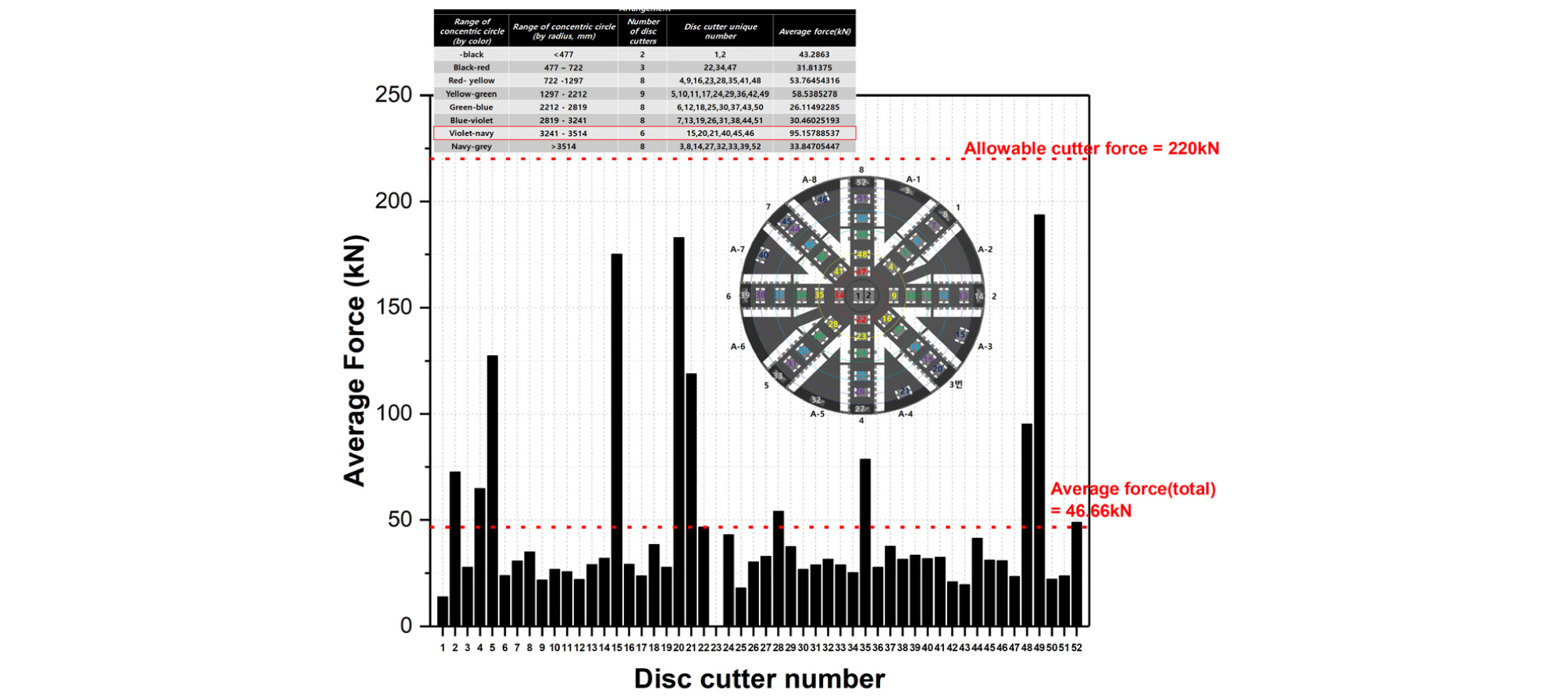
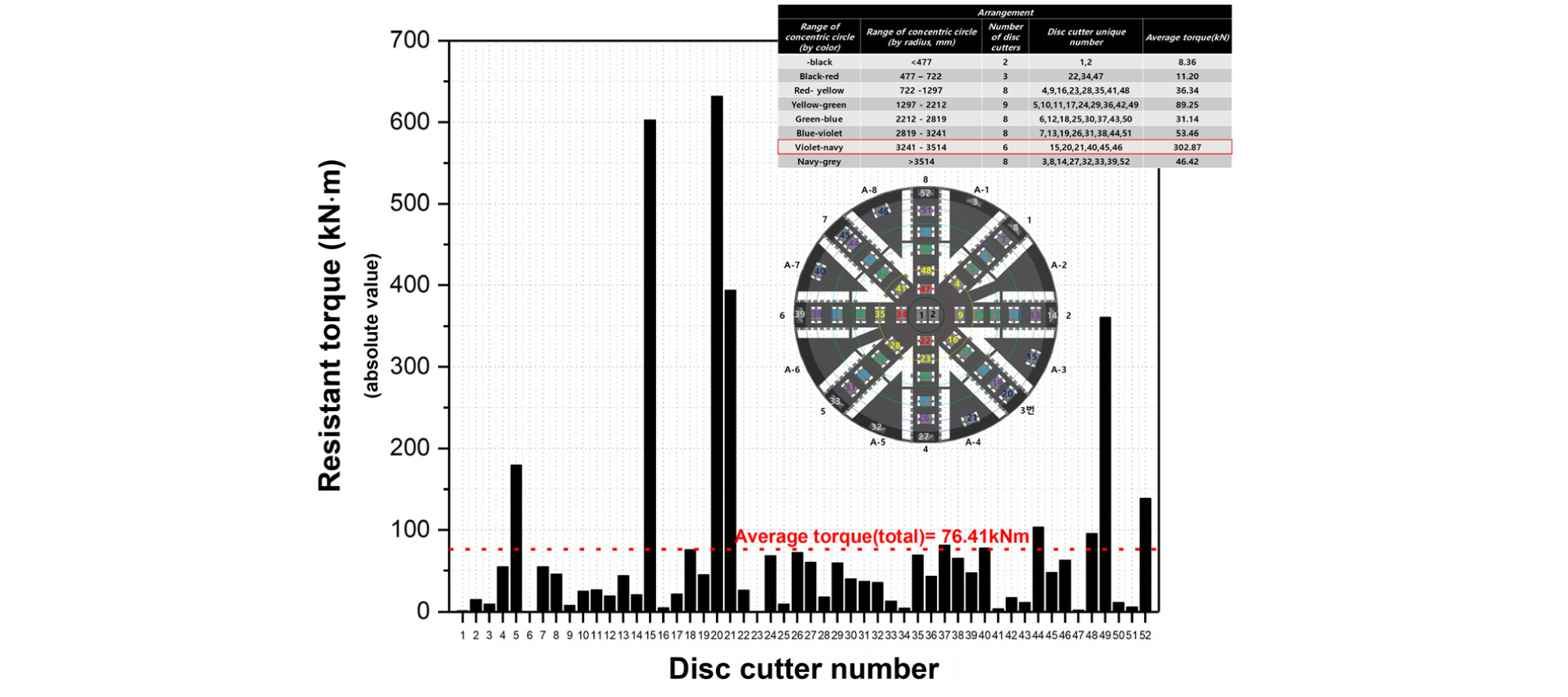
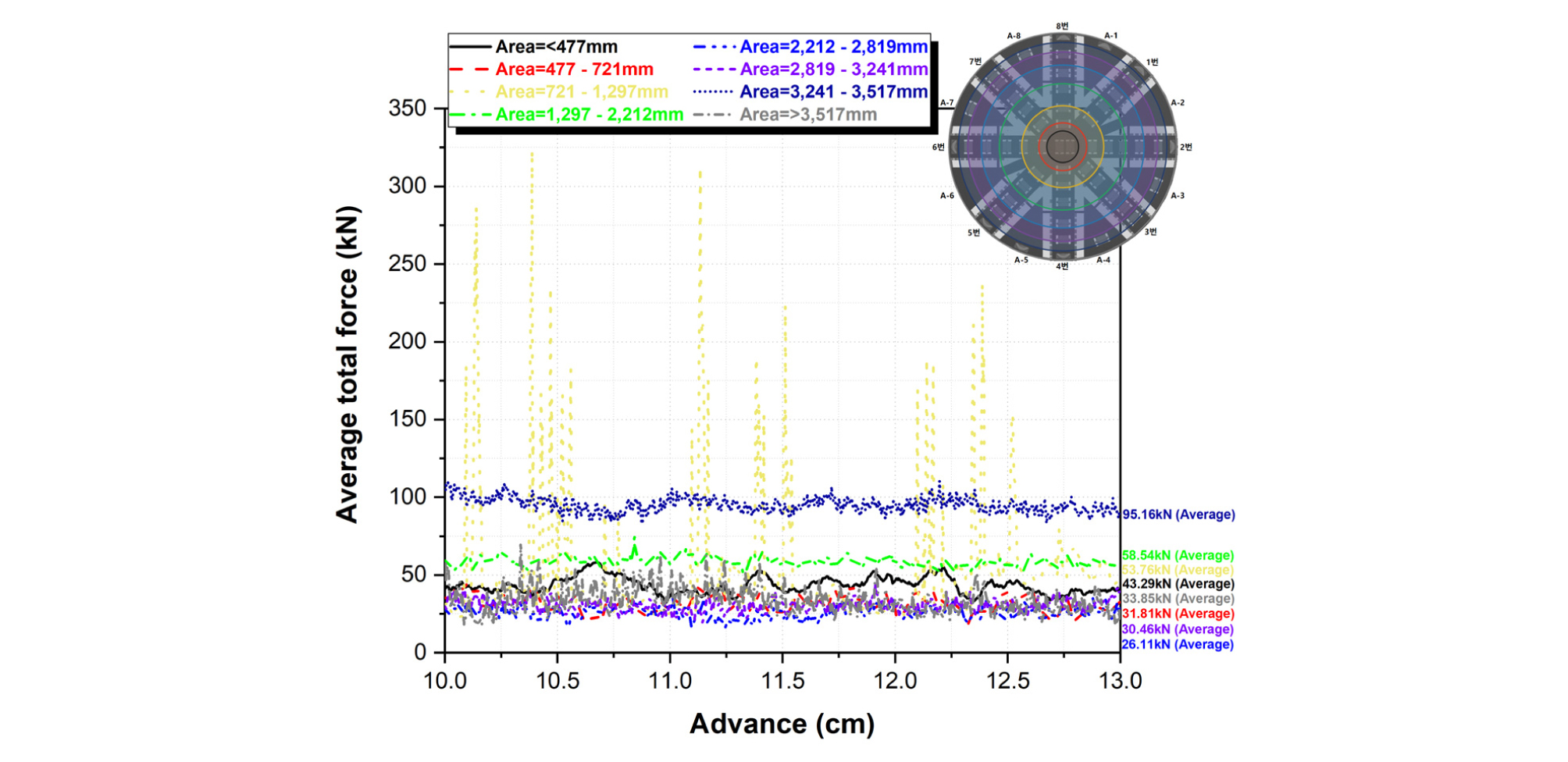
연구에서 고려한 커터헤드면의 반경별 평균 반력은 Fig. 14와 같다. 그림에서는 디스크 커터, 커터 비트와 커터헤드면에서 발생한 모든 반력을 구간별로 분석한 것이다. 분석 결과, 노란색으로 나타낸 712∼1,297mm 구간의 값은 굴진과정 중 상대적으로 크게 측정된 경우가 있었다. 이는 커터헤드면의 형상에서도 확인할 수 있듯이, 개구부가 넓고 중앙 지점으로 갈수록 좁아지는 삼각형 형태를 가지고 있기 때문인 것으로 파악된다. 즉, 해당 개구부를 통해 입자가 빠져나갈 때, 커터헤드면의 형상에 의해 끼임 등의 현상이 나타날 가능성이 커서 발생한 결과로 판단된다. 이는 DEM 해석에서 입자는 강체로 고려되며 다만 입력된 접촉조건에 의해 약간의 겹침이 허용되는 조건이기 때문에 굴진이 강제적으로 모사되는 해석 조건에서 끼임이 발생할 경우, 주어진 접촉 조건에 따라 반력이 크게 측정될 수 있기 때문이다. 해당 구간을 제외한 경우에서는 3,241∼3,517mm 구간에서 가장 큰 평균 반력을 보였으며 2,212∼2,819mm 구간에서 가장 낮은 값인 26.11kN이 산정되었다.
5. 결론
본 연구에서는 DEM 기법을 적용해 토사 지반을 모델링하고 토압식 쉴드TBM의 굴착 과정을 모사하였다. TBM이 굴진함에 따라 커터헤드면과 쉴드, 절삭 도구에 작용하는 외력을 정량적으로 계산할 수 있었다. 스크류 오거의 모델링을 통해 배토 과정에서 발생하는 배토량을 검토할 수 있었다. 본 연구를 통해 검토한 연구 내용을 정리하면 다음과 같다.
(1) 본 연구에서는 적절한 토사 지반을 모사하기 위해 지름이 100mm인 단일 입자를 사용하여 지반을 구성하였다. 적절한 지반강성을 갖는 지반을 모사하기 위해 직접전단 시험 해석을 통해 지반의 물성을 검증하였다. 직접전단 시험 해석을 통해 단일 입자 100mm를 사용할 경우 입력해야할 접촉조건과 입자 물성을 제시하였다.
(2) TBM에서 사용되는 스크류 오거 장치를 해석에 적용한 결과, 주어진 굴착 조건에서 스크루 오거를 통해 토사 배출량 모사가 가능하였다. 주어진 스크류 오거를 통해 해석 과정 중 일정한 배토를 유도할 수 있었으며 TBM 각 부분의 입자개수를 검토한 결과 해석 과정 중에 일정하게 유지되는 것을 확인하였다.
(3) 해석 모델을 통해 커터헤드면에 나타난 디스크 커터, 커터 비트, 면 부분에 반력과 토크를 굴진 과정에 따라 산정할 수 있었다. 이를 통해, 커터의 위치에 따른 반력과 토크를 따로 산정할 수 있으므로 향후 굴진 거리에 따른 커터헤드면의 회전 수와 커터의 회전 거리를 활용하여 디스크 커터의 교체 주기에 관한 연구를 추가로 수행할 수 있을 것으로 판단된다.
(4) 절삭 도구에 나타난 반력과 토크를 검토한 결과, 디스크 커터의 경우, 게이지 커터 부근에서 가장 큰 반력과 토크가 관찰되었다. 커터헤드면 전체에 걸치 반력을 검토하였을 경우에서도 디스크 커터의 경우와 유사하게 나타났다.
(5) DEM 해석 방법을 사용한 본 연구에서는 TBM 굴진과정을 모사하기 위해 커터헤드의 회전(RPM)과 TBM의 회전에 따른 굴진 거리(REV)를 고정하고 해석을 수행하였다. 하지만 실제 TBM 운전에 있어서는 토압에 따른 챔버압과 TBM 사양, 스크류 오거의 배토량에 의해 챔버압을 조절하면서 수행되기 때문에 향후 이에 대한 고려가 있어야 할 것으로 판단된다. 따라서, 커터헤드면에 작용하는 반력 등을 servo-control 하면서 주어진 TBM 사양에 따라 회전수와 회전에 따른 굴진 거리를 역으로 고려하는 해석이 추가로 수행되어야 한다.
