

1. 서 론
2. 토공량 산정시스템 개발
2.1 3D Reconstruction 알고리즘
2.2 3D 모델 부피 추정 알고리즘
3. 토공량 현장 검증시험
3.1 토공량 산정 현장 검증시험 조건
3.2 GCP(Ground Control Point) 측량
3.3 드론 측량
4. 현장 검증시험 결과
4.1 GPS 현황 측량을 이용한 토공량 산출
4.2 드론 측량을 이용한 토공량 산출
4.3 현장 검증시험 결과
5. 결 론
1. 서 론
건설현장에서 토공량은 설계에서 시공에 이르기까지 공사비에 미치는 영향이 크기 때문에 정확한 산출이 무엇보다 중요하다. 실제 대규모 토목공사에서는 기성물량 산출측량을 주기적으로 실시하고 있지만, 제한된 시간 내에 정확한 토공작업의 물량을 산출하기에 한계가 있다. 본 연구에서는 정확한 토공량 산출을 위하여 토목공사현장에서 측량, 시공 관리 및 유지・보수 등 다양한 분야에 활발히 적용되고 있는 보급형 회전익 드론을 이용하여 토공량 산출 현장 검증시험을 수행하였다. 드론은 무인 원격조정장치, 무인기(Unmanned Aerial Vehicle, UAV)를 통칭하며, 조사자의 접근이 어려운 지형에 대한 정확한 데이터 확보 또는 현장점검 수준을 고도화하기 위해 이용되고 있다(Lim et al., 2015; Oh, 2018). 드론을 이용한 무인 항공사진측량은 경제성과 시간 절약의 장점이 있으며, 정밀한 지형자료를 취득할 수도 있다. 최근 드론 항공사진측량을 이용한 토목공사 현장 적용성에 관한 연구(Kim et al., 2016)와 3차원 공간정보 기반 토목공사 현장관리 플랫폼 개발 등 토공현장에 드론을 활용하는 연구 사례(Kim et al., 2018)가 증가하고 있다. 토공량 산정을 위해 무인항공기기를 이용하여 정사영상(Orthomosaic)과 수치표면 모델(Digital Surface Models, DSM)을 제작하여 토공량을 지상측량 결과와 비교 검증한 UAV(Mapping- Drone) 측량 연구도 수행 되어졌다(Choi and Kim, 2014; Han and Park, 2018). 이 밖에도 건설현장에서 사면 붕괴 예방을 위해 UAV를 활용하여 비탈면 수치표고 모델을 도출하고 도로 설계프로그램에 적용하는 방법을 제시한 연구(Kim et al., 2019), 토공현장에서 드론을 활용한 작업의 진척도 관리방안(Park et al., 2018)과 지형 계측에 초점을 두어 건설 현장을 비교한 연구(Hugenholtz et al., 2015)들도 보고되는 등 다양한 연구가 활발히 진행되고 있다.
본 연구에서는 드론 촬영을 활용한 고정밀 토공량 산출을 위하여 ㈜카르타(Carta)와 공동 연구를 수행하여 고정밀 부피 계산 알고리즘을 개발하였다. 토공량 부피 계산 알고리즘의 정확도 검증을 위하여 한국건설기술연구원 연천 SOC 실증센터에서 현장 검증시험을 수행하였다. 총 3단계로 절토 및 성토 작업을 수행하였고, 각각의 절・성토량은 GPS 측량 장비를 이용하여 지형 측량 수행 후 부피를 계산하여 표본 값으로 사용하였다. 동일한 절・성토 구간에 대해 드론 촬영을 실시하여 얻어진 이미지를 활용하여 토공량 산출 및 토량 환산 계수를 계산하고 지형 측량 결과와 비교 검증을 수행하였다. 새롭게 개발된 부피 계산 알고리즘은 드론 촬영으로 습득된 항공사진을 이용하여 3차원 수치지도를 생성한 후, 정합된 정사영상과 DSM을 이용하여 부피 값을 계산할 수 있다. 또한, 목표 현장에 대한 3차원 모델을 생성 후, 토목 공사 전후 모습의 비교를 통해 토공량을 산정하는 프로그램이다. 개발된 프로그램의 정밀도 검증을 위해 기존 드론 및 항공 측량에 널리 이용되고 있는 항공사진측량 소프트웨어(Pix4D)의 결과와도 비교・분석하였다.
2. 토공량 산정시스템 개발
2.1 3D Reconstruction 알고리즘
토공 부피 계산 알고리즘은 토공량 산정 정확도 향상을 위하여 드론으로 촬영된 이미지들이 가지고 있는 위도, 경도, 고도 및 카메라의 기울기 등의 정보로부터 Bundle Adjustment를 이용하여 카메라의 내부 파라미터, 카메라의 상세한 위치 등을 계산 하여 3D Reconstruction 구현한다. 드론 촬영 이미지들은 내장된 GPS(Global Positioning System) 센서에 의해 각각 위도, 경도, 고도, 카메라의 기울기 값 등 기본 정보를 가지고 있지만, 오차를 포함하고 있기 때문에 정확한 현장 측량을 위해서는 GCP(Ground Control Point)를 이용한 보정과정인 3D Reconstruction이 필요하다. 본 연구에서는 이를 구현하기 위하여 Bundle Adjustment를 이용하여 카메라의 내부 파라미터, 카메라의 상세한 위치 등을 계산하였다. Bundle Adjustment는 상공에서 촬영된 이미지의 월드 좌표계 상에서의 정확한 위치를 알아내는 기술로, 서로 다른 시점(View point)을 가지고 있는 여러 장의 사진을 이용하여 카메라의 위치와 각도를 추정하는 기술이다. 각각의 카메라 j는 벡터 aj로, 3D 포인트 i는 벡터 bi로 나타낼 수 있다. Bundle Adjustment는 예측되는 투사점(Q)과 실제 카메라 위치 사이의 오차인 재투사 오차를 최소화하는 방식으로 다음과 같은 식 (1)이 이용된다. 투사점 값과 실제 카메라의 위치에 대한 유클리드 거리(Euclidean distance)가 최소가 되는 해를 찾는 것이 Bundle Adjustment의 목적으로 Bundle Adjustment의 결과로 추정한 이미지셋의 카메라 위치정보와 이미지셋의 특징점들을 추출하여 포인트 클라우드(Point Cloud) 데이터를 얻어낼 수 있다.
| (1) |
여기서, Q : 투사점(Projection)
aj, bi : 3D 포인트 벡터 값
xij : 유클리드 거리(Euclidean distance)
포인트 클라우드 데이터에서 발생한 아웃라이어(Outlier)에 대해 반복되는 계산을 통하여 최적의 값을 얻게 되면, 각각의 이미지들로부터 깊이 정보(Depth map) 역시 Bundle Adjustment 과정을 통해 계산할 수 있다.
2.2 3D 모델 부피 추정 알고리즘
드론 촬영 이미지를 활용하여 정확한 토공량 산정을 위해 3D 모델 부피 추정 알고리즘을 개발하였다(Carta Survey). 3D 모델에서의 부피 추정을 위해 DSM을 이용하였다. 본 연구에서는 정확한 부피 측정을 위해 x, y 셀 방식과 단면 중첩 방식을 모두 도입하였다.
2.2.1 x, y 셀 방식
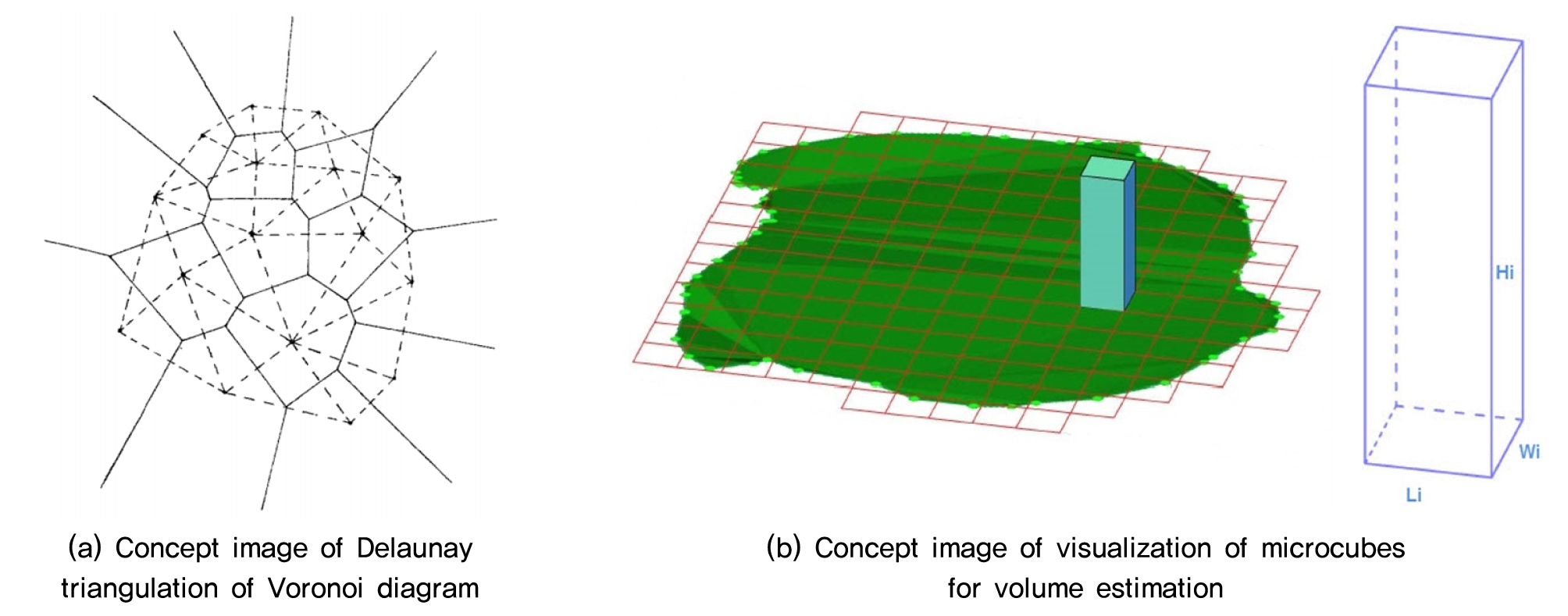
부피 측정을 위한 x, y 셀 방식에서는 DSM에서 부피를 측정할 지형의 테두리를 점의 형태로 선택하면 점을 선택한 순서에 따라 다각형이 생성되어 해당 다각형 지형의 부피를 계산할 수 있다. 부피는 선택된 다각형을 들로네 삼각분할(Delaunay triangulation)로 계산된다(Field, 1988)(Fig. 1(a) 참조). 들로네 삼각분할은 보로노이 다이어그램(Voronoi diagram)으로부터 구할 수 있는데, 보로노이 다이어그램은 평면을 특정 점까지의 거리가 가장 가까운 점의 집합으로 분할한다. 이 보로노이 다이어그램 내부에 포함된 점들을 연결하면 들로네 삼각형을 얻을 수 있고, 이 방식을 들로네 삼각분할이라 한다. 들로네 삼각분할로 생성된 삼각형은 그 삼각형의 외접원이 다른 삼각형의 어떤 꼭짓점도 포함하지 않는 특징을 가지고 있어, 점들로 평면을 만드는 데에 유리하여 3D 모델 부피를 추정하는 기술에 적용하였다. 하지만 이렇게 계산된 들로네 삼각분할은 사용자가 선택한 관심지역의 바깥 부분도 포함하는 단점을 가지고 있다. 삼각분할 된 다각형은 절토된 지형에 대해서는 상한 z축 높이가 결정되고, 성토된 지형에 대해서는 하한 z축의 높이가 결정되게 된다. 기준 높이가 계산되면 설정한 GSD(Ground Sampling Distance)의 크기에 따라 가로축과 세로축의 일정 크기로 분할된 정사각형과 계산된 기준 z축 높이를 곱하여 미세 직육면체의 부피를 구한다. 이 과정을 반복하여 모두 합산하면 3D 모델 부피를 추정할 수 있다. Fig. 1(b)는 부피 측정을 위한 미세 직육면체 가시화 방식의 개념을 보여준다.
2.2.2 단면 중첩 방식
단면 중첩 방식은 실제 공사 현장 측량 값을 이용하여 토공량 등 부피를 계산하는데 주로 활용하는 방식으로, 측량 지형을 일정 단위 간격으로 잘라 면에 수직한 다수의 평면을 만든다. 이 평면에 대한 면적 값을 적분을 통해 구한 후, 단위 간격을 곱하면, 측량할 현장의 전체 부피에서 단위 간격 당 부피를 계산할 수 있다(식 (2) 참조).
| $$\Sigma(\mathrm{단위}\;\mathrm{간격}\;\ast\;\mathrm{단면도의}\;\mathrm 부피)=\mathrm{실제}\;3\mathrm D\;\mathrm{모델의}\;\mathrm 부피$$ | (2) |
3. 토공량 현장 검증시험
3.1 토공량 산정 현장 검증시험 조건
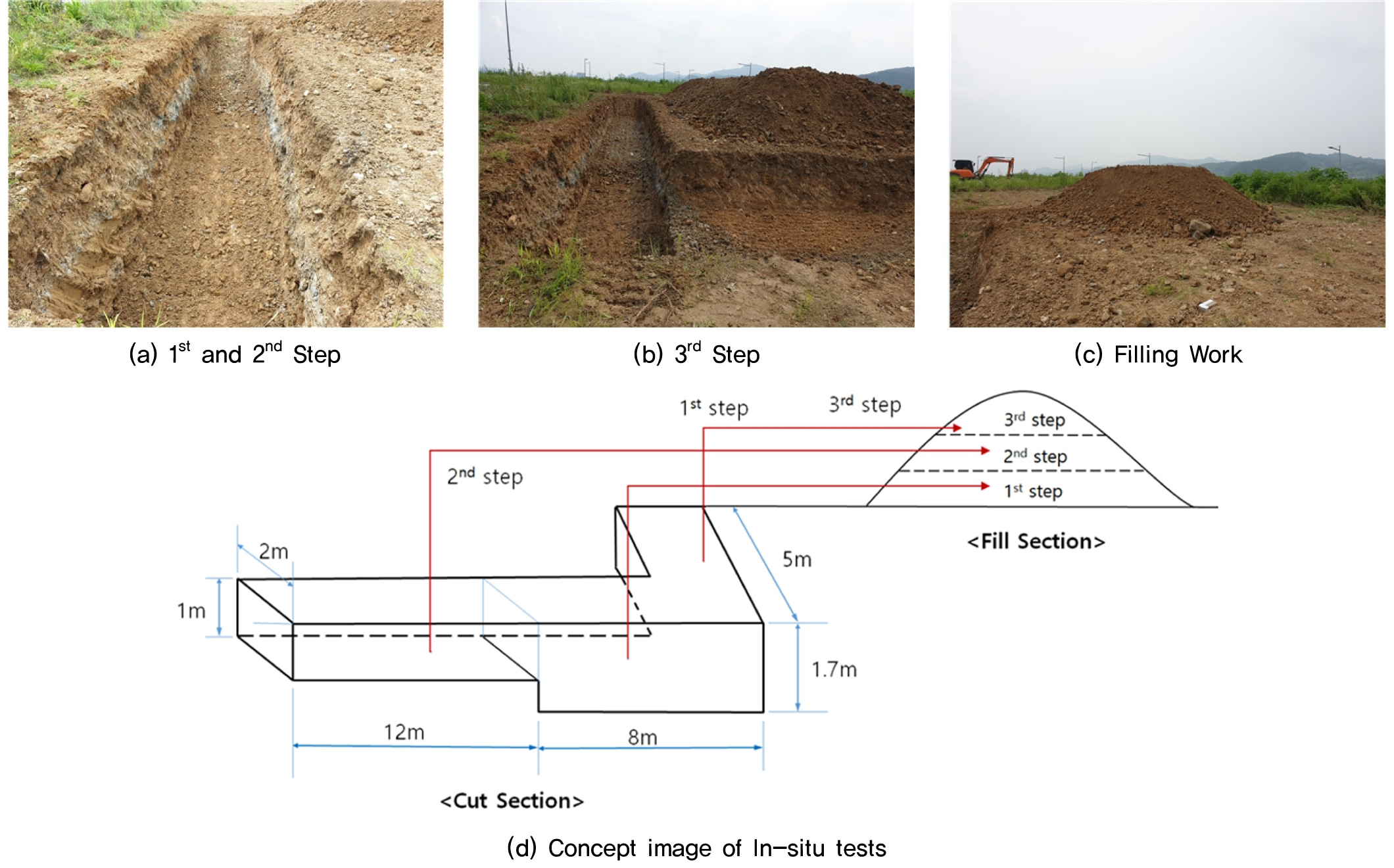
정확한 토공량 산정 부피 추정 알고리즘 개발을 위해 한국건설기술연구원 연천 SOC 실증센터에서 현장 검증시험을 수행하였다. 드론 촬영을 이용한 토공량 부피 산정을 위해, 총 3단계 절토 및 성토를 수행하였다. 1, 2 단계 절토는 동일한 폭(2m)으로 깊이가 다른(1.7m, 1m) 일직선 단면으로 총 20m 길이로 절토 작업을 수행하였다(1단계: 8m×2m×1.7m, 2단계: 12m×2m×1m). 3단계 절토는 2단계 절토와 동일한 깊이(1m)와 폭(2m) 조건으로 측정 부피 지형 변화를 위해 2단계 절토단면과 수직방향으로 수행하였다. Fig. 2는 현장 검증시험 전경과 과정을 보여주고 있다. 현장 검증시험을 수행한 지반은 표준관입시험과 탄성파 굴절법 탐사를 통해 조사를 이루어졌고, 깊이 5m까지 N값이 20∼30 범위 안에 존재하며, 중간정도 조밀함의 상대밀도를 갖는 암갈색을 띄는 자갈섞인 실트질 모래로 구성되어 있다. 설계시방서에 따르면 1.20∼1.30의 토공량 환산 계수를 갖는다. 절토와 성토의 부피는 Cloud Compare라는 프로그램을 사용하여 가로, 세로로 셀을 나누어 1cm 간격 조건으로 계산하였다.
3.2 GCP(Ground Control Point) 측량
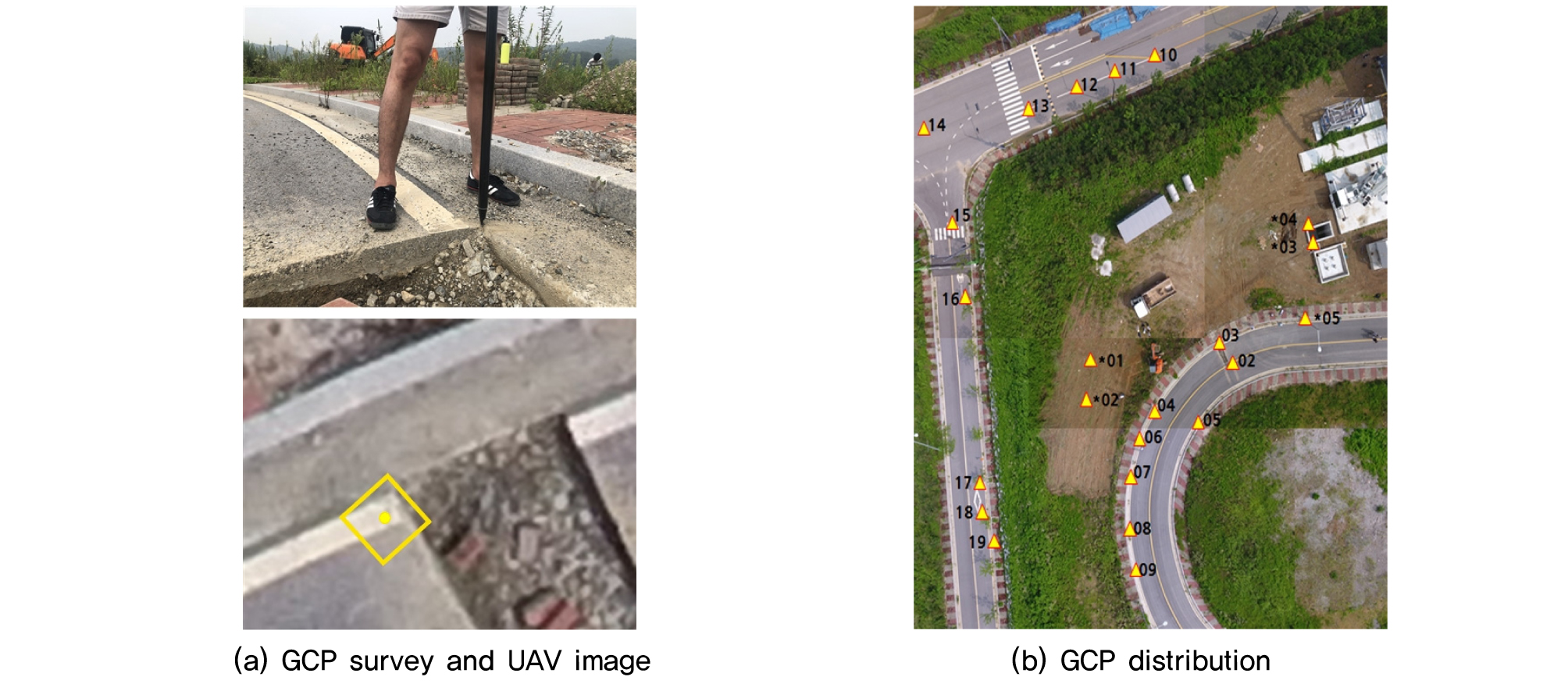
본 연구에서는 GCP를 이용하여 정확한 현장 측량을 실시하였다. GCP 측량은 RTK-VRS 장비를 이용하여 총 23개 지점에 대해 수행하였고, 각 좌표는 X(North), Y(East), Z(Heigh)의 TM 좌표계로 측정되었으며 Fig. 3은 GCP 측량 전경 및 분포도를 보여주고 있다.
3.3 드론 측량
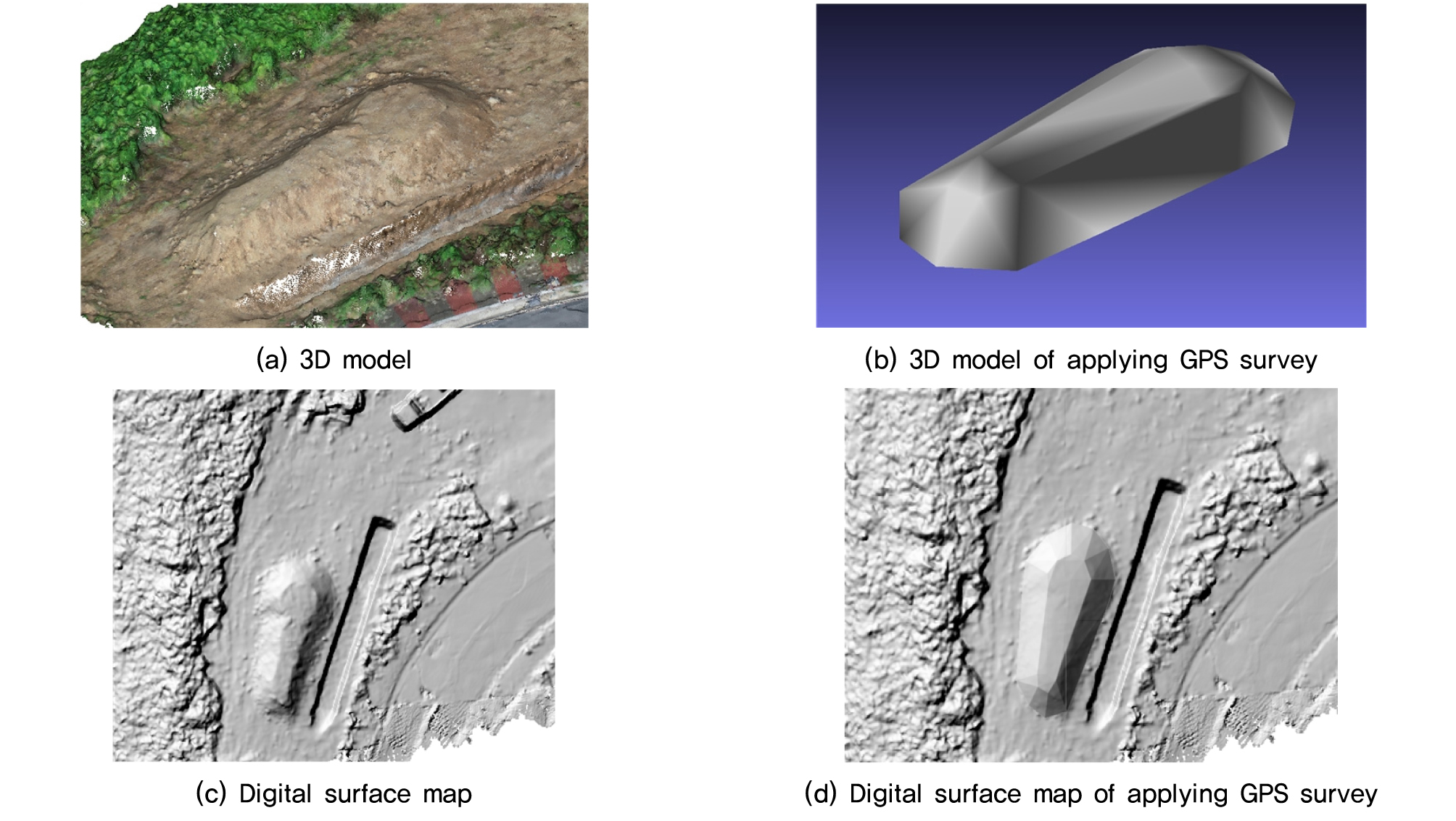
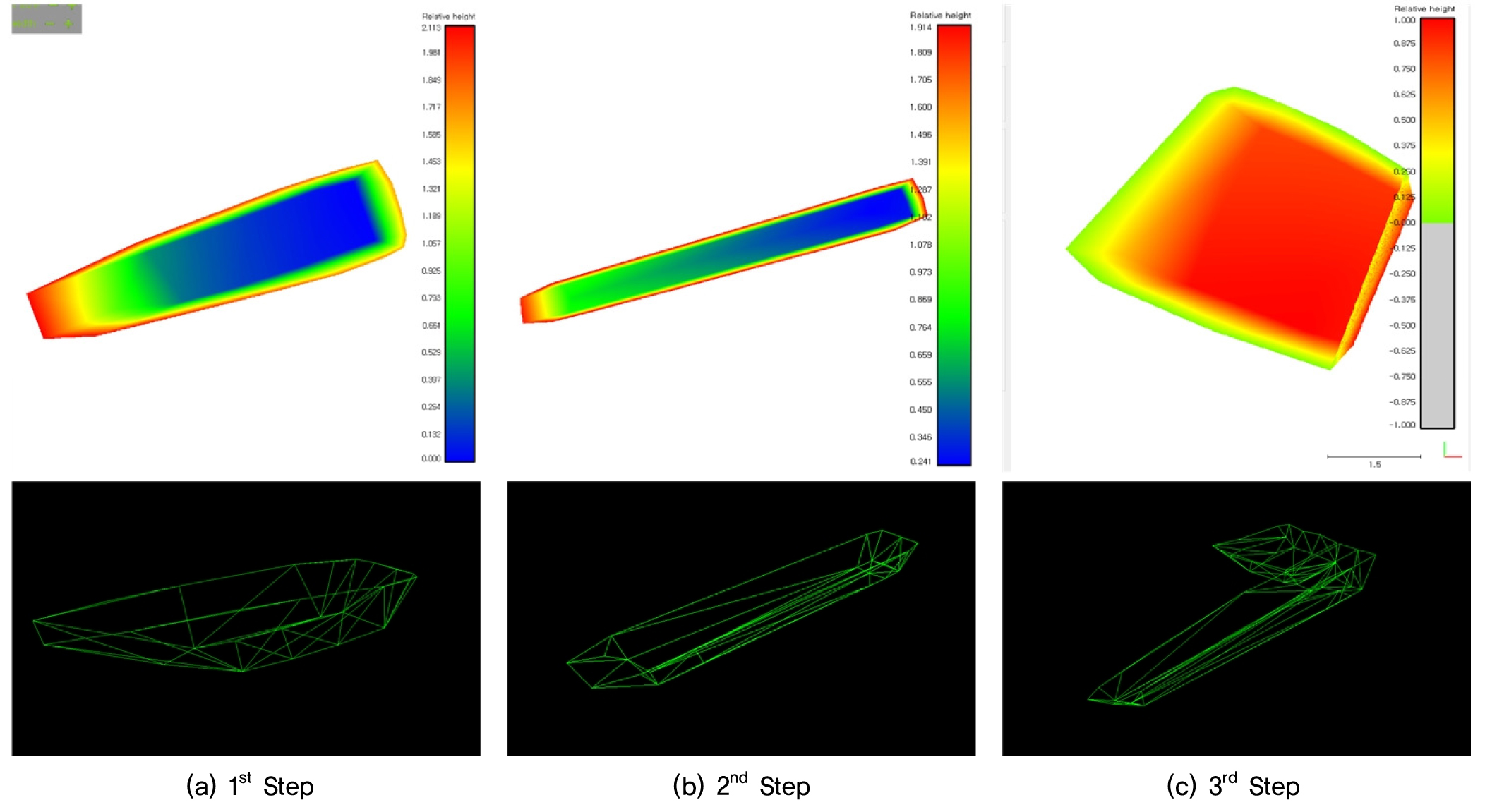
현장 검증시험에서는 보급형 회전익 드론인 PHANTOM 4 Pro를 사용하였고, 드론에 설치된 카메라는 4864×3648 크기의 이미지로 셔터 속도 1/320, 초점길이 8.8mm의 사양을 갖는다. 본 연구에서는 비행고도 약 20m, 60m, 이동 속도 약 7m/s 조건으로 약 20분간의 자동비행으로 약 11,000m2(100m×110m) 지역에 대해 313장의 드론 촬영이 이루어졌다. 드론 촬영으로 얻어진 항공사진을 이용하여 3차원 수치지도 생성 후, 항공사진측량 소프트웨어(Pix4D)와 본 연구에서 개발된 시스템으로 계산한 토량 부피 값을 비교・검증 하였다. Fig. 4는 새롭게 개발한 알고리즘을 이용하여 드론 촬영 이미지를 3D 모델화 하고, 부피 계산을 위해 GPS 측량 범위를 적용하여 만든 수치표고 모델을 보여주고 있다.
4. 현장 검증시험 결과
4.1 GPS 현황 측량을 이용한 토공량 산출
총 3단계로 수행된 절・성토량 부피 계산은 기존의 공사현장에서 적용되고 있는 GPS 측량 장비(RTK-VRS)를 이용하여 지형 측량을 수행하여 측정되었다. 1단계 절・성토면은 각각 31개, 21개 지점, 2단계 절・성토면은 각각 57개, 41개 지점에 대해 측량이 이루어졌고, 3단계는 절토면에 대해서만 77개 지점에 대한 측량을 수행하였다. 각 절・성토 단면의 측량 좌표를 Cloud Compare를 사용하여 계산하였다. Fig. 5는 1, 2, 3단계 절・성토가 수행된 지형에 대한 GPS 표고 모델(Fig. 5(위))과 각 측량점을 가시화(Fig. 5(아래))한 모습을 보여주고 있다. GPS 측량 좌표들을 이용하여 기준면을 설정하고, 기준면 경계점을 포함하는 평면을 구성 후 절토 부위에 대한 삼각망으로 구성 후 셀을 구성하여 부피를 계산하였다. 계산된 절・성토 부피를 이용하여 다음 식 (3)을 이용하여 토량 환산 계수도 계산하였다.
| $$C\;=\;\frac{\mathrm{다짐상}태\;토\mathrm 량}{\mathrm{자연상}태\;토\mathrm 량}\;,\;\;\;\;\;\;\;\;\;L\;=\;\frac{흐트\mathrm{러진상}태\;토\mathrm 량}{\mathrm{자연상}태\;토\mathrm 량}$$ | (3) |
4.2 드론 측량을 이용한 토공량 산출
드론 촬영으로 얻어진 항공사진을 이용하여 3차원 수치지도를 생성한 후, 항공사진측량 소프트웨어(Pix4D)와 토공량 부피 계산 값을 비교하였다. Fig. 6은 각 단계별 드론에서 촬영된 정사영상을 보여주고 있다. 정사영상은 현재 모델을 한눈에 볼 수 있는 2D 이미지로, 카메라에서 발생하는 모든 왜곡을 제거하고 지도와 같은 이미지를 추출해낸 결과물이다. 정사영상은 사진을 기반으로 3차원 모델이 생성된 이후에 3차원 모델에서 다시 추출한 이미지이다. 즉, 3차원 모델을 수직(Ortho)으로 사상(Projection) 시킨 결과물이다. 이는 무한대의 거리에서 촬영한 사진과 비슷하다. 정사영상 데이터를 활용하여 드론으로 촬영한 데이터를 기존 GIS 정보와 연동시킬 수 있다.
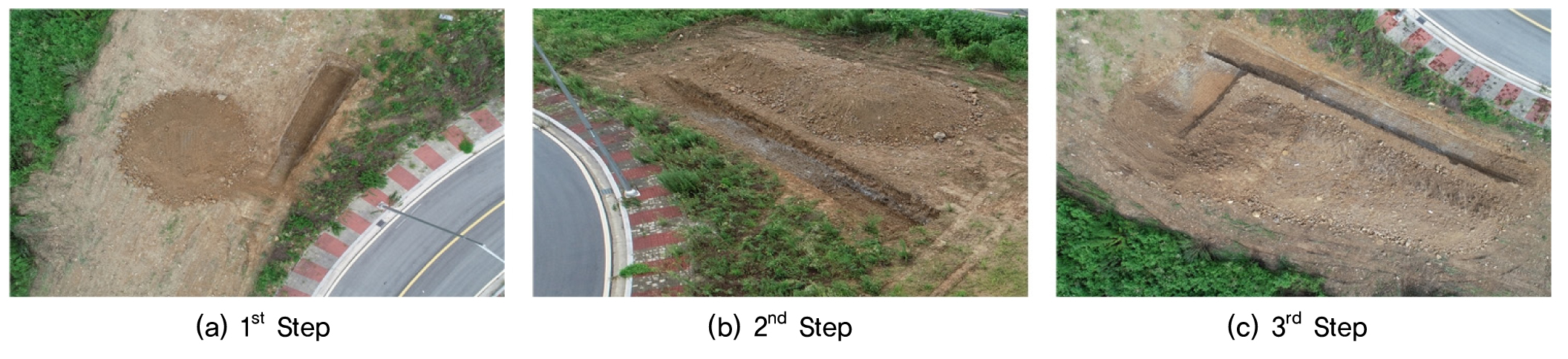
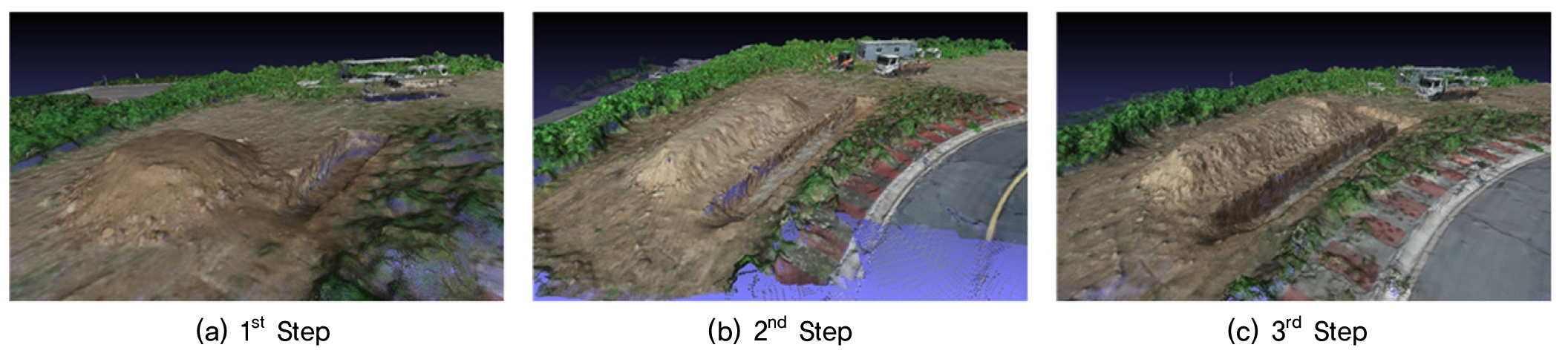
Fig. 7은 정사영상 데이터를 포인트 클라우드화 한 이미지를 보여주고 있다. 포인트 클라우드는 x, y, z 값을 가진 점들로 이루어진 3차원 데이터이다. 이는 3D Reconstruction의 가장 기본이 되는 데이터로 x, y, z의 위치 정보와 RGB 색상 값을 가진 점들이 높은 밀도로 모여 마치 구름처럼 보인다고 해서 갖추어진 이름이다. 3D Reconstruction은 이미지 간의 공통된 특징점을 찾고 이를 바탕으로 3차원 모델을 만들어내는데, 이때 공통된 특징점 하나가 포인트 클라우드에서 하나의 점으로 나타난다. 포인트 클라우드의 포맷은 크게 PLY, LAS가 있다. PLY는 Polygon File Format의 약자로 가장 원본 그대로(Raw)의 데이터이다. 각 점의 기본적인 값(x, y, z, RGB)을 담고 있는 포맷이다. LAS는 원래 Lidar Point Cloud, 즉 라이다 센서를 통해 수집한 데이터를 담는 포맷이었으나, 최근에는 라이더 센서 이외의 3차원 데이터로도 같이 사용되는 포맷이다. LAS는 PLY보다 훨씬 복잡한 포맷으로 좌표계나 원점 정보를 포함하여 다양한 메타 데이터를 추가할 수 있다는 장점이 있다. 본 연구에서 개발한 토공량 부피 계산 알고리즘은 LAS와 PLY 포맷을 모두 지원한다.
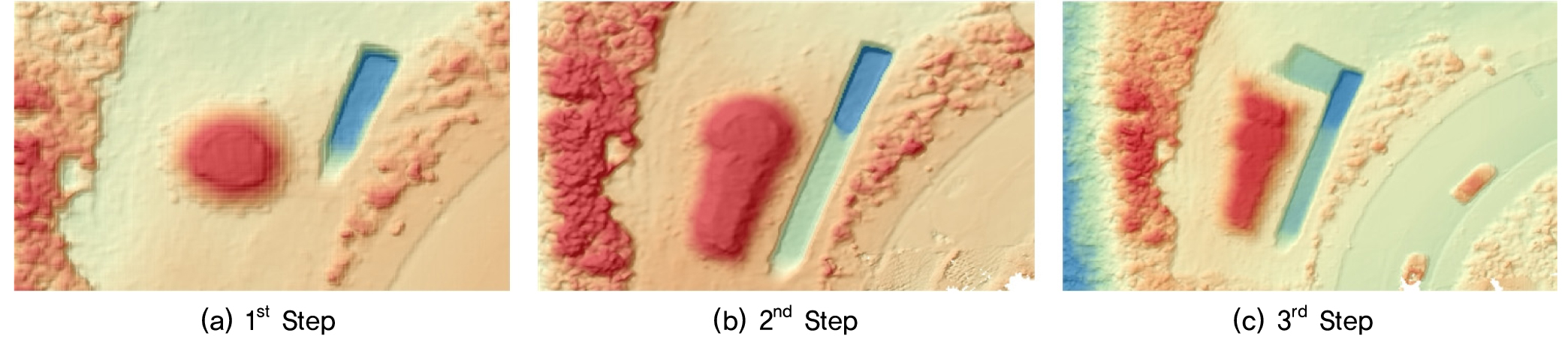
Fig. 8은 각 단계별 DSM을 보여주고 있다. DSM은 지형의 고도 값을 수치로 저장함으로써 지형의 형상을 나타내는 자료이다. 수치표고 모델은 정사영상과 같은 2D 이미지에 색상 값을 고도에 따라 다르게 만들어 시각화할 수 있다.
4.3 현장 검증시험 결과
정확한 절・성토 부피 측정을 위해 GPS 측량 장비를 이용한 지형 측량과 드론을 이용한 항공 촬영을 동시에 수행하였다. 드론을 활용한 항공 측량 토공량 산출은 항공사진측량 소프트웨어(Pix4D)와 본 연구에서 개발된 부피 계산 알고리즘을 이용하여 계산되었다. Table 1은 각각의 방식으로 계산된 절토 및 성토 부피 계산 결과이고, Table 2는 식 (3)을 이용하여 계산된 토량 환산 계수를 나타내고 있다.
Table 1. Measurement value
Table 2. Soil conversion factor
| Step | Soil conversion factor | |||
| GPS Survey | Pix4D Survey | Carta Survey | Reference Value | |
| 1 | 1.301 | 1.296 | 1.370 | 1.20 ~ 1.30 |
| 2 | 1.320 | 1.344 | 1.247 | |
| 3 | N/D | 1.289 | 1.330 | |
드론 촬영 이미지를 이용한 부피 계산 시 항공사진측량 소프트웨어(Pix4D)는 셀 방식이 이용되어졌다. 본 연구에서 개발된 알고리즘은 부피계산 시, 셀 방식과 단면 중첩 방식 모두 적용할 수 있다.
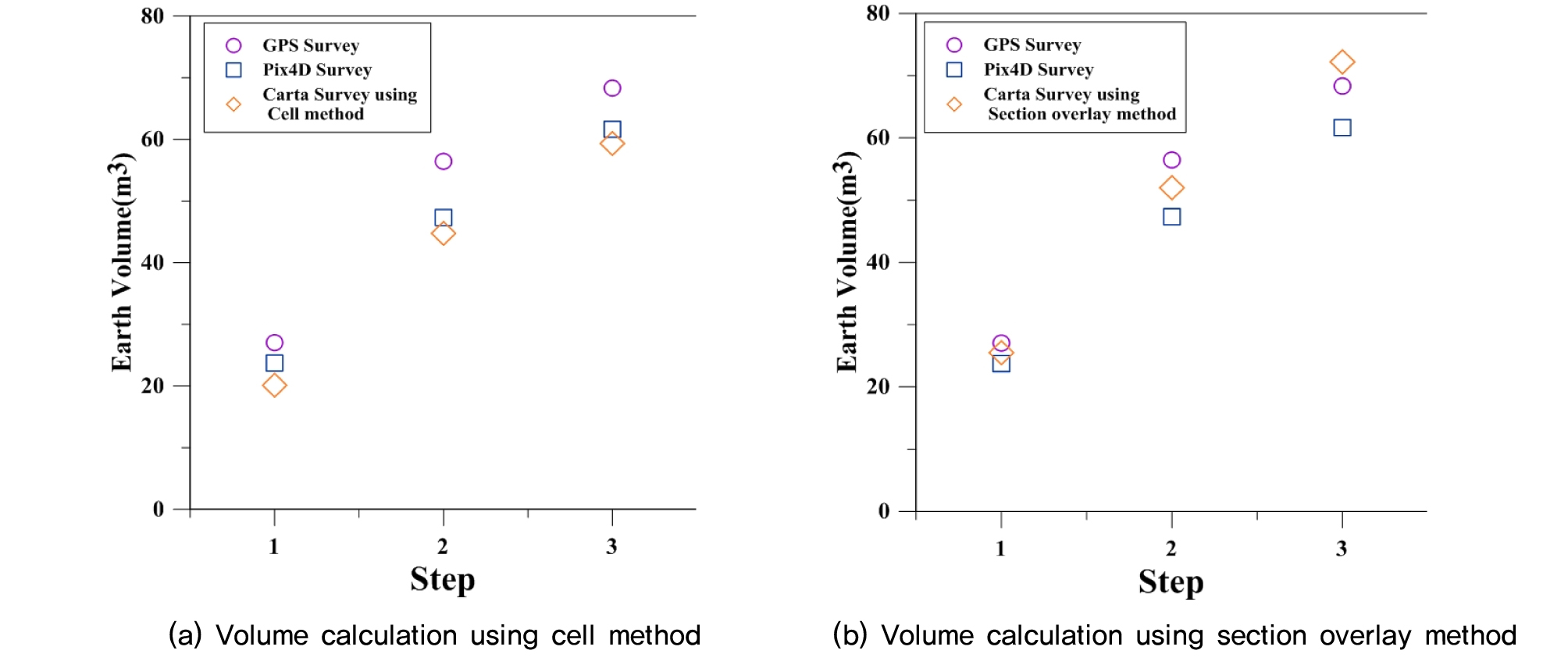
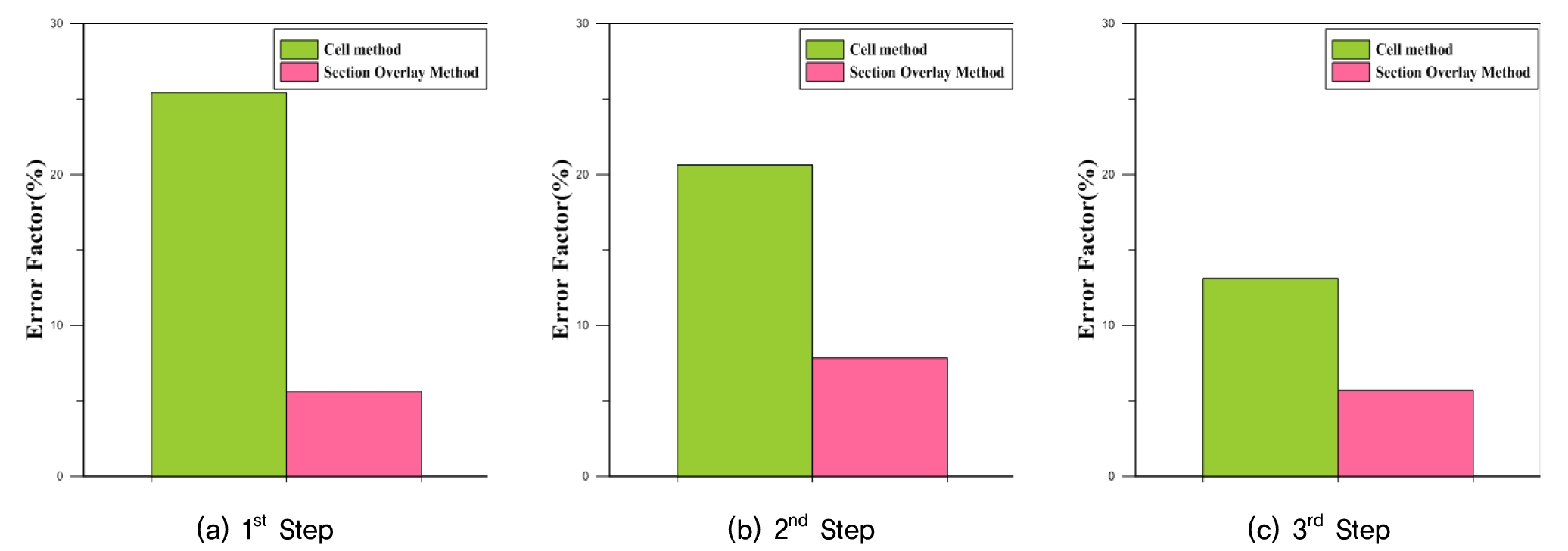
Fig. 9는 본 연구에서 개발된 부피 계산 알고리즘에 셀 방식과 단면 중첩 방식 각각을 적용시켜 지형 측량 방식과 범용소프트웨어(Pix4D)와 각 단계별 절토량을 비교한 결과를 보여주고 있다. 그 결과, 셀 방식을 적용시켰을 경우 기존에 널리 사용되고 있는 소프트웨어(Pix4D)와 유사한 결과를 보여주고 있지만 지형 측량 결과와는 오차가 크게 발생하였다. 하지만, 단면 중첩 방식을 적용한 부피 계산 결과, 지형 측량을 이용한 토공량 산출과 매우 유사한 결과를 보여주고 있다. 지형 측량 기준으로 오차율 계산 결과 역시 단면 중첩 방식을 적용한 알고리즘이 약 5%로 셀 방식보다 정확한 값을 보여주고 있다(Fig. 10 참조).
각각의 부피 계산 방식은 크게 다음의 두 가지 원인에 의해 결과의 차이가 발생하였다고 판단된다. 첫 번째, 단면 중첩 방식은 단면도를 구성하는 2차원 평면에 한해서 2차원의 단면을 구성하는 다항함수를 수학적으로 적분하여 곡선의 면적을 계산하는 방식이다. 이 부분에 있어서 단면 중첩 방식은 무한히 작은 수준의 Resolution을 가지고 있는 것이라 볼 수 있다. 반면에 셀 방식은 단면도를 자른 방향과, 단면도를 자른 방향에 수직한 방향 모두에 대하여 설정한 Resolution으로 면적 및 부피를 추산한다. 따라서 단면도를 자른 방향에 대한 면적에 한해서는 단면 중첩 방식에서 측정된 면적 값이 셀 방식에서 측정된 면적 값보다 정확한 값을 가진다고 볼 수 있다. 두 번째, GPS로 측량한 영역은 일정 간격(수십 cm)을 기준으로 측량된 모형을 기준으로 측정된 부피이기 때문에 단면도를 자른 방향에 수직인 방향에 대해서는 단면 중첩 방식의 Resolution이 이 GPS로 측량한 측량점 사이의 간격과 더 가까운 값이기 때문에 셀 방식과 비교하였을 때 단면 중첩 방식을 적용한 토공량 부피 계산 결과가 유사한 것으로 보인다.
5. 결 론
본 연구에서는 토공량의 정확한 산출을 위하여 드론 촬영 기술을 활용한 부피 계산 알고리즘을 개발 하였으며, 시스템의 검증 연구를 수행하였다. 드론을 이용한 고정밀 토공량 산출을 위하여 현장 검증시험을 수행하였고, GPS 측량 장비를 이용한 지형 측량과 드론 촬영으로 습득된 항공사진으로 각각 토공량을 산출하여 비교하였다. 또한, 드론 촬영 사진을 이용한 부피 계산의 경우 정확도 검증을 위하여 기존 드론 측량에서 널리 사용하고 있는 항공사진측량 소프트웨어(Pix4D)와 본 연구에서 개발된 알고리즘을 이용하여 각각의 방식으로 토공량을 산출하였다.
현장 검증시험 결과, 셀 방식 부피계산만이 적용되는 항공사진측량 소프트웨어(Pix4D)의 토공량 부피는 지형 측량 토공량 부피 계산 결과와 약 10∼20%의 큰 오차가 발생하였다. 새롭게 개발한 토공량 산출 시스템은 셀 방식과 단면 중첩 방식 모두를 적용할 수 있으며, 셀 방식을 적용하였을 때 항공사진측량 소프트웨어(Pix4D)의 토공량 부피와 유사한 결과를 나타내었다. 또한, 단면중첩방식을 적용하였을 때 지형 측량 토공량 부피 결과와 오차율 5%정도로 정확한 결과를 보여 주었다. 이러한 결과를 종합하였을 때, 새롭게 개발된 시스템(프로그램)은 토공량 산출에 활용 될 수 있을 것으로 판단된다.
프로그램의 오차 역시 드론 촬영 이미지를 이용하여 수치지형도를 제작하는 과정에서 GSD(Ground Sampling Distance)를 더 세밀하게 조정한다면, x, y셀 방식, 단면 중첩 방식 모두 정밀한 결과를 도출할 수 있을 것으로 판단된다. 향후 다양한 지반조건, 광범위한 지형 등을 대상으로 검증 연구를 수행하여 시스템의 완성도를 향상시킬 예정이다.
