

1. 서 론
2. 달 크레이터 탐사의 필요성
3. 달 환경 구현 인프라
3.1 지반 열 진공 챔버
3.2 행성 환경 등판 시험장
4. 탐사 로버 등판 시험장 설계
4.1 경사각도 조절
4.2 탐사 로버 등판 시험장 설계
5. 결 론
1. 서 론
행성 탐사 로버가 미션을 실패하는 주된 원인은 설계 수명 이외에도 행성 표면의 연약한 지반으로 인해 이동기구가 빠져 나오지 못하거나 극한 환경에서 기계적 시스템이 동작하지 않는 경우가 발생하는 것이다. 이에 따라 우주 행성의 연약한 지표면에서의 탐사 로버 휠과 지형 사이의 상호작용에 의한 물리적 현상을 명확히 하고 그에 따른 주행성능을 예측 및 평가하고, 주행저항을 작게 하고 에너지 손실을 최소화하는 이동 메커니즘 설계할 필요가 있다.
60년대 베커에 의하여 정립된 바퀴-지형 상관관계는 행성탐사 로버 시스템 설계 및 농기계 등 다양한 분야에 적용되었다(Garber and Wong, 1981). 이를 통해 지형 변화에 대응되는 구동면의 압력 및 침하, 슬립 등을 예측할 수 있다(Wong and Rece, 1967).
로버의 바퀴와 지형 간의 마찰-슬립 특성은 주행성을 변화시키는데 주요한 요소로 작용한다. 이와 관련하여 야지환경에서 마찰-슬립 특성을 고려한 지형 모델링 분야는 군사 로봇 및 탐사로봇 등의 주행성 극대화 및 구동 에너지 효율성 확보를 위하여 많은 연구들이 이루어지고 있다. 이러한 바퀴-지형 상관관계에 따른 물리적 현상을 예측하기 위해서 지형을 해석적 방법, 경험적 방법, 반 실험적 방법을 통하여 모델링한다. 해석적 방법은 컴퓨터의 계산 능력을 기반으로 지형의 형태를 유한한 요소로 나누고 수치적 인 분석을 통하여 지형을 모델링하는 방법이다. 해석적 방법은 지형의 모델을 예측하기 위해서는 많은 계산 시간이 요구되어, 거친 지형에서 실시간으로 지형 정보를 예측해야 하는 주행시스템이나 로버에게는 적합하지 않다는 단점을 가지고 있다. 경험적 방법은 지형에 원추 관입 시험기를 관입시켜 얻어지는 수치를 통하여 경험적으로 지형에 관한 특성관계식을 유도하는 방법이다. 다음으로 반 실험적 방법은 바퀴-지형 상관관계에 관한 물리적 모델을 구하고, 실험 장치를 이용한 측정을 병행하여 주행특성을 예측하는 방법으로 주로 행성 탐사를 목적으로 하는 로버의 구동 환경을 예측하는데 사용된다(Bekker, 1970).
행성탐사에 적용된 대표적인 반 실험적 방법으로 로버의 바퀴와 유연한 모래지형과의 상호작용에 대한 모델을 유도하고 측정을 통하여 얻어진 실험데이터를 적용하여 바퀴가 지면에 가하는 최대 힘 및 전단응력을 추정하는 연구가 수행되었다(Chen, 1993). 이외에 반 실험적 방법으로 모래, 잔디, 아스팔트 등의 서로 다른 지형에 대한 노면강도를 측정하고 그에 따른 최적 슬립율 및 최대마찰계수를 추정하는 연구가 수행되었다(Kim and Lee, 2014). 달, 화성 등의 행성을 포함하여 험지 및 야지 등 다양한 지형환경에서 운용되는 주행 장치나 로버의 주행성능을 예측하기 위해서는 해당 지형에서 실물 크기의 장치로 주행성능을 평가하거나, 실내에 축소 모델 테스트베드를 구성하여 주행특성을 평가하게 된다. 행성탐사 로버의 경우, 바퀴-지형의 상관관계 모델을 기반으로 테스트베드에서 얻어진 실험결과들을 적용하여 주행 특성을 평가하고 예측하는 반 실험적 방법이 현실적으로 적용할 수 있는 유용한 방법이다. 본 논문에서는 탐사로버의 바퀴-지형 상호작용에 따른 물리적 현상을 규명하기 위하여, 관련된 주요 변수들을 우주 환경을 모사한 실대형지반열진공챔버 안에서 측정하고 평가할 수 있는 우주 행성 탐사 로버 등판 시험장을 설계하였다.
2. 달 크레이터 탐사의 필요성
달에는 대기가 없어 표면 온도가 극심하게 변할 뿐만 아니라, 휘발성(volatile) 물질은 우주의 고진공 환경에서 유실되며, 고체 상태로 유지되기 어렵다. 그럼에도 달의 극 지방의 영구 음영지역(Permanently Shadowed Region, PSR)에는 얼음이 존재할 수 있다는 주장이 1960년대에 처음으로 나왔다(Watson et al., 1961).
이론적으로 혜성 충돌에 의해 들어온 얼음 형태의 물은 태양빛이 들어오지 않는 극지방의 영구음영지역(Permanently Shadowed Regions; PSR)에 오랫동안 증발하지 않고 유지될 수 있다. 달에서 물의 충분한 공급원이 확보된다면 인간이 생존할 수 있는 달기지 건설이 가능하다. 달 표면에는 물이 풍부한 운석, 소행성 등의 외부 물질들의 충돌이 빈번하기에 과학자들은 다른 가능성에 대한 여지를 남겨두고 있다. 운석 등을 통해 달로 유입된 물은 대부분 태양빛에 의해 수소와 산소 원자로 나뉘어져 우주공간으로 날아가겠지만 일부는 추운 지역들을 따라 달 극지방에 위치한 영원히 그림자가 드리워진 PSR로 이동된다(Ishigami, 2008).
지난 시간동안 PSR지역에 축적되어진 물은 오늘날 달 개발 시 활용할 수 있을 만큼의 양으로 존재할 가능성이 있다. 이러한 가능성에 대한 의문은 1970년대부터 이어졌고 1996년 클레멘타인 호가 달의 남극 부근에서 물의 존재를 발견함으로써 사실로 밝혀졌다. 물은 인간 생존을 위한 공급원으로서 뿐 아니라 수소와 산소로 분리하여 연료화하였을 때 달 탐사, 또는 더 먼 곳으로 가기 위한 로켓의 에너지원으로도 엄청난 가치가 있다.
달 극지방에는 영원히 그림자가 드리워져 추운 지역이 존재한다. 달의 자전축은 달이 태양을 공전하는 면과 거의 수직을 이루는데 이에 따라 달의 극지방에서는 태양빛이 대부분 수평으로 입사하게 된다. 또한 클레멘타인호에 의해 발견된 크레이터인 Aitken basin은 태양계 내에서 가장 큰 크기의 운석 충돌로 생성된 것으로 알려져 있는데, 크레이터의 지름이 250km, 깊이 13km로 매우 큰 크기를 가지고 있어 달의 남위 50゚에 위치함에도 달의 남극 지역이 이 안에 포함되어 있다(Hiroaki et al., 2012).
Fig. 1는 달의 남극지역의 지형도이다. 빨간색은 고도가 높은 부분이고 보라색은 고도가 낮은 부분이다. 남극지역이 Aitken basin의 테두리 내에 위치함을 확인할 수 있고 이는 남극지역이 태양빛이 비치는 수평면 아래에 위치하여 많은 부분이 PSR에 존재함을 알 수 있다.
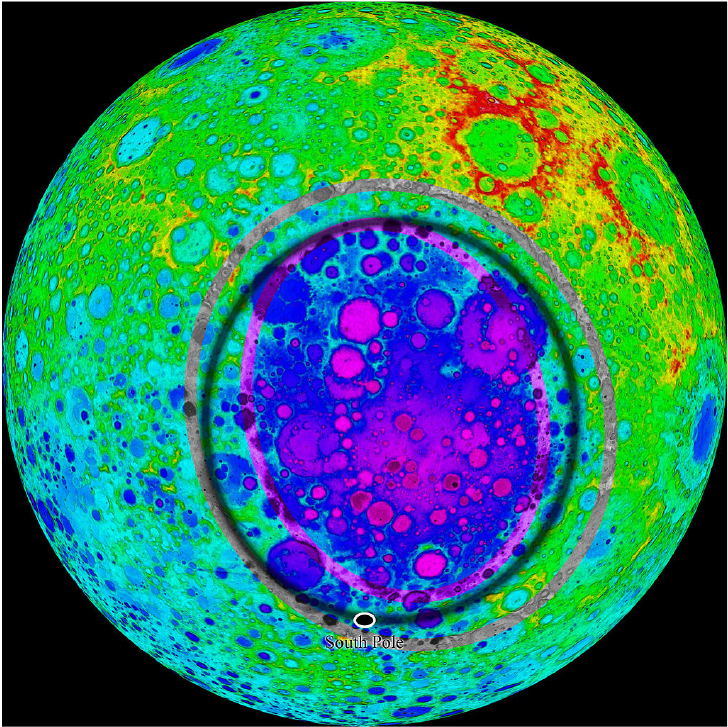
Fig. 1.
The crustal thickness map of the Moon, centered on the farside (South Pole-Aitken Basin) (Hiroaki et al., 2012)
NASA 연구원들에 의하면 PSR의 온도는 –230゚~ -20゚C로, 냉기로 채워져 있다고 하여 “cold traps”으로 불린다(Iagnemma et al., 2004).
이들 지역은 적어도 30~40억년은 존재하였기에 충돌한 운석들로부터 물을 축적할 충분한 시간을 보냈다. 클레멘타인 호는 달에서 물의 존재에 대한 여러 가능성을 보여주었지만 물의 존재를 탐사하기위해 보낸 위성은 아니기에 탐사 결과에 대한 불확실성을 내재하고 있다.
2009년 NASA에서는 달 남극 지방의 물의 존재 여부를 확인하기 위한 미션 수행을 위하여 달 크레이터 탐사선 LCROS(Lunar Crater Observation and Sensing Satellite)을 쏘아 올렸다. 남극의 Cabeus 분화구에 2.2ton짜리 로켓 Centaur를 초속 2.5km의 속도로 충돌시켜 깊이 18~30m 가량의 웅덩이를 팠으며를 카메라와 적외선 추적기를 활용해 충돌로 발생한 먼지 구름과 웅덩이 내부에 대한 데이터를 수집하였다(Medina et al., 2015).
LCROS 미션은 물의 존재가 예상되는 지역과의 충돌을 통해 약 90리터의 물을 발견하였으며, 위성 탐사를 활용하여 물의 존재가 예상되는 지역에 생각보다 많은 양의 물이 존재함을 확인하였다.
달의 얼음을 어두운 지역 주변의 태양열 발전기 또는 핵발전기를 통해 산소와 수소로 전기분해할 수 있으며, 이는 인간이 계속 주거할 수 있는 달 기지를 가능하게 한다(Ryu, 2022). 또한 이것은 발사체의 연료로 사용될 수 있기에 지구와 달 사이의 위성과 로켓을 위한 중간 경유지 역할도 할 수 있게 되어 우주탐사 비용을 상당히 줄일 수 있을 것으로 기대하고 있다. Fig. 2는 NASA의 달 탐사 기지의 컨셉이다.

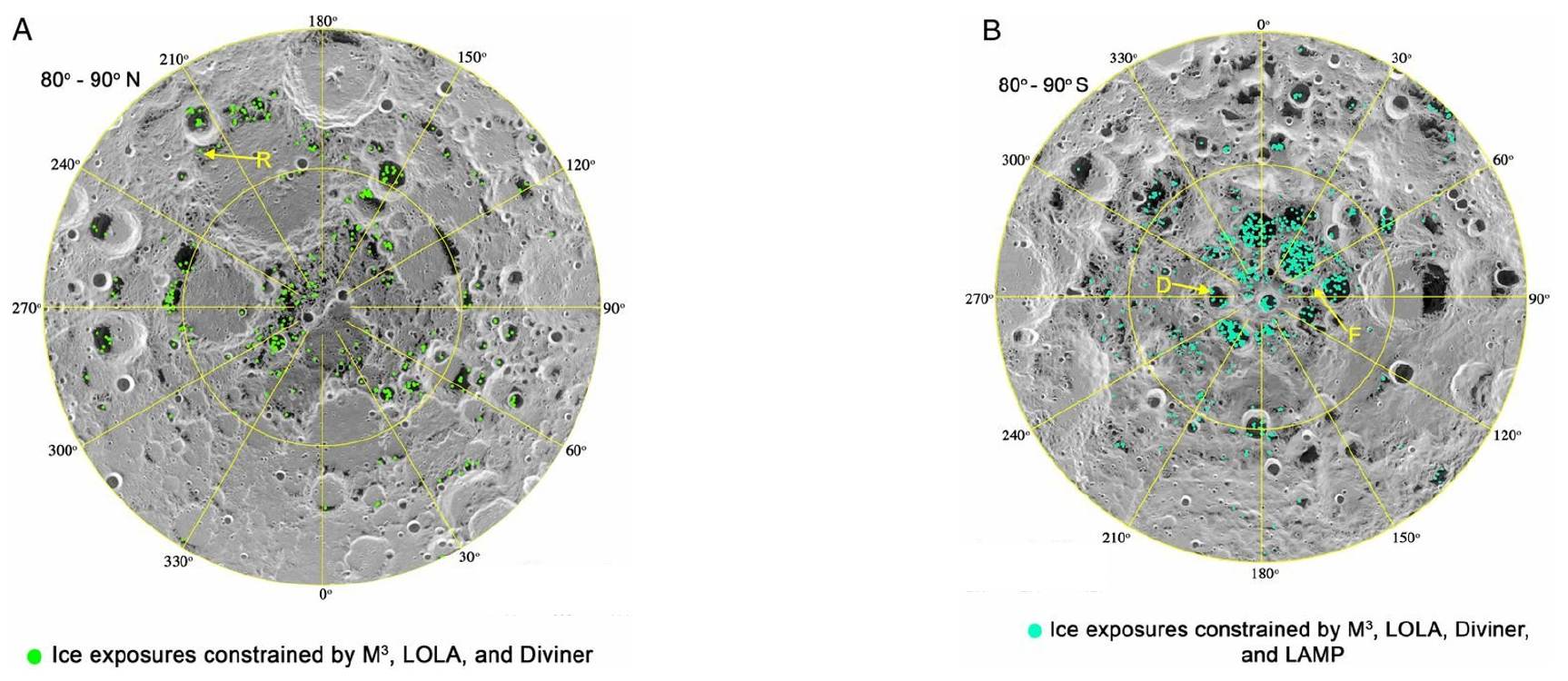
달탐사를 위한 물 자원의 확보는 달탐사를 계획하고 있는 국가들에게 가장 큰 이슈이다. 이는 우주 탐사 연구뿐만이 아닌 우주 공간에서의 급유라는 점 때문에 상업적으로도 관심을 받고 있는 분야이다. 현재 미국과 일본이 LCROS와 SELENE 등을 통한 남극 지방의 위성 탐사를 실시하여 물의 존재를 확인하였고 물이 있을 것으로 예상되는 지역들을 탐사하고 있다. Fig. 3은 NASA의 탐사선에 달린 중성자 분광계로 얼음의 존재가 예상되는 지역들을 표시한 달 지도이다. 위성탐사를 통해 물의 존재가 가능한 지역을 선별하여 예상지역들에 대한 구체적인 조사에 들어가고 있으나 실제로 물이 어느 정도로 집중되어 있는지, 위성탐사 결과가 정확한 것인지 등은 직접 가서 샘플을 채취하여 분석하지 않는 이상은 알 수 없기에 PSR에 있는 예상지역들을 탐사할 수 있는 여러 가지 방법들을 연구 계획하고 있다(Schepelmann, 2022).
무인 달탐사 미션은 대부분 착륙선의 착륙 용이성과 태양에너지의 이용을 위하여 크레이터 외부에 착륙지점을 확보하게 되며 크레이터 내부의 PSR 지역이 탐사의 가장 최우선 지역이기 때문에 로버가 직접 크레이터 내부로 들어가야 하고, 또한 충전을 위해 착륙선으로 회귀해야 한다. 이러한 로버의 크레이터 내외부로의 주행을 위해서는 로버가 이러한 험지대를 적어도 10km이상 주행할 수 있어야 하며 30゚되는 크레이터의 경사면을 오르내릴 수 있어야 한다. 현재까지 개발된 로버들은 현장 시험에서 장시간, 경사면, 고운 토립자 등에서 주행에 어려움이 있었다. 이러한 극한의 우주환경 및 다양한 행성의 표면에서의 로버의 자동주행 및 탐사가 요구되기에 현장시험 주행에 초점을 맞춘 로버들이 개발되고 있으나 크레이터 탐사에 필요한 경사면 주행에는 한계가 있다.
3. 달 환경 구현 인프라
3.1 지반 열 진공 챔버
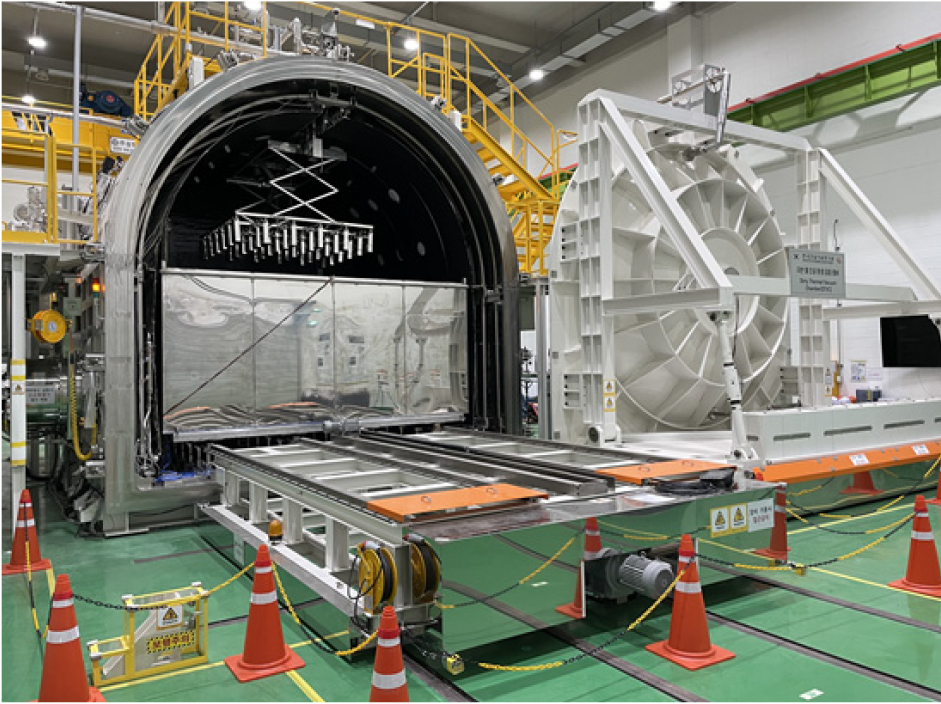
현장시험에행성표면 환경에서 행성 지상 탐사미션에 투입되는 다양한 탑재체들의 기술 검증을 위하여 한국건설기술연구원의 지반열진공챔버(Dirty Thermal Vacuum Chamber, DTVC)는 토조가 포함된 상태에서 온도를 최대 100°C에서 최소 -180°C로 제어하며 진공도를 1×10-5mbar 이하로 형성할 수 있는 세계 최대 규모의 진공 챔버이며 내부 크기는 4×4×4m, 내부 용적은 약 50m3이다(Fig. 4). 이 지반열진공챔버는 달의 온도 및 진공 환경을 모사하여 달 탐사 임무를 수행하기 전 극한환경에서 장비들의 원활한 작동 여부를 평가하기 위하여 제작되었다.
진공챔버에는 고온 환경을 형성하기 위해 챔버 상단에 할로겐 램프가 부착되어 있으며, 저온 환경 조성을 위해 액체 질소를 활용하는 쉬라우드가 구비되어 있다. 고온 환경 모사를 위한 할로겐 램프는 6×6의 Array형으로 구성되어 토조 전 면적에 걸쳐서 표면을 균일하게 가열하고 히터 높이를 조절함으로써 가열 온도를 조절할 수 있도록 설계되었다. 지반열진공챔버의 극저온 환경 모사를 위한 쉬라우드는 구리 플레이트와 스테인리스 스틸 파이프를 용접한 형태로 구성되며 좌측, 우측, 후면, 전면, 바닥 등 5개 모듈로 제작되었다.
지반열진공챔버 내부에는 최대 4×3.8×1.8m 크기의 토조를 탑재할 수 있으며 이 토조에는 달의 토양을 모사하기 위하여 한국건설기술연구원에서 개발한 인공월면토가 채워져 있다. 인공월면토는 화산활동을 통하여 생성된 달의 실제 토양을 모사하기 위하여 현무암을 베이스로 하였으며, 파분쇄 후 체분리를 통하여 달의 토양과 비슷한 입도 분포를 갖도록 제작되었다. 토조를 가득 채웠을 때의 인공월면토의 양은 무게로 환산할 경우 약 25 ton에 해당한다. 한국건설기술연구원은 10 ton의 인공월면토가 탑재된 상태에서 10 시간의 감압을 걸쳐 1×10-5mbar 수준의 진공환경을 토양의 disturbance 발생 없이 조성할 수 있는 기술을 확보하였다. 고진공 형성을 위한 펌프로는 Venturi pump, Dry Pump, Turbo molecular pump, cryogenic pump 등이 사용된다.
3.2 행성 환경 등판 시험장
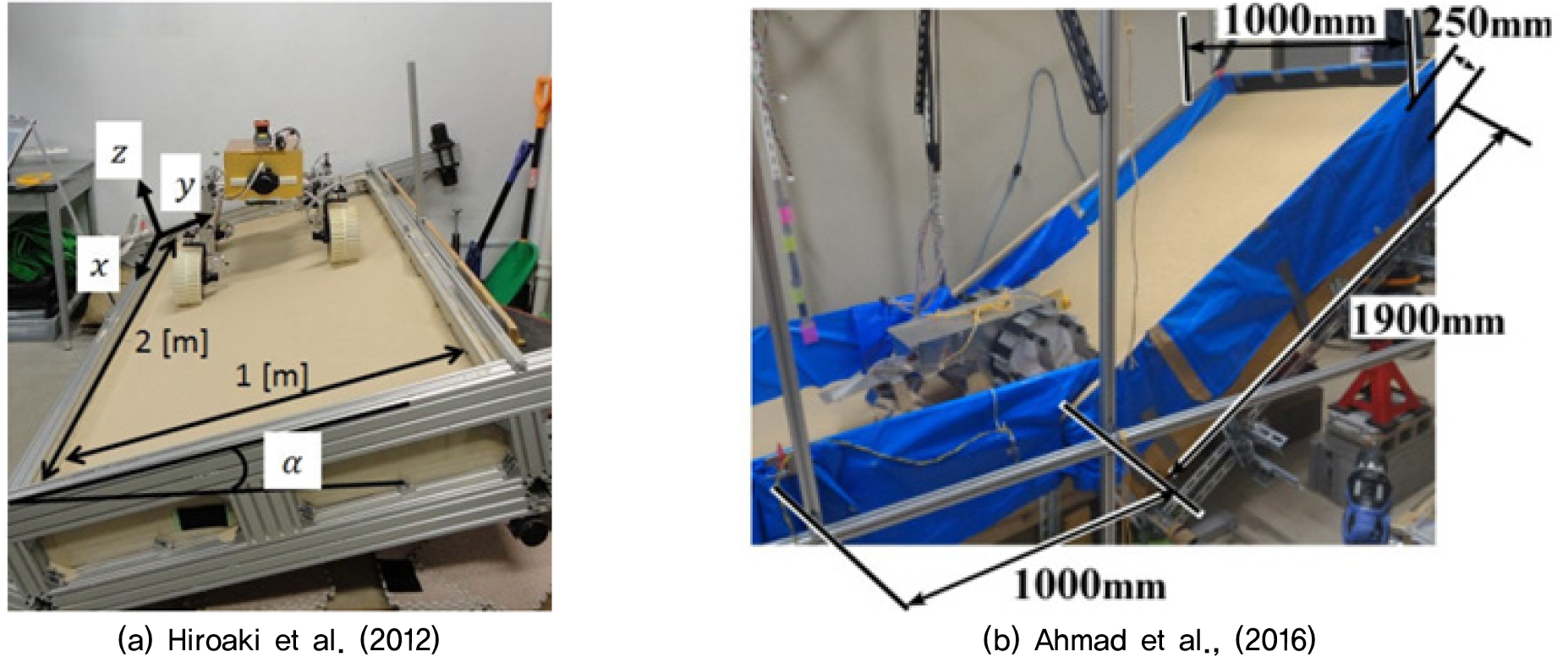
우주 행성 탐사 로버의 등판시험장은 경사를 가진 실제 지형에서 로버의 움직임을 간접적으로 테스트할 수 있는 시설이다. 전 세계적으로 로버의 주행성을 평가하기 위한 여러 종류의 경사 테스트 베드가 개발되어 활용되고 있다. 테스트 베드는 토조 형태의 베드와 필드 형태의 베드 등 두 종류로 구분할 수 있다.
Fig. 5(a)에서처럼 토조 형태의 작은 크기의 테스트 베드는 미세한 각도로 등판대의 경사를 제어할 수 있으며 다양한 종류의 흙을 바꾸어가며 실험을 할 수 있기 때문에 보다 다양한 환경에 대한 정밀한 데이터를 얻을 수 있는 장점이 있다. 다만 크기에서 오는 한계 때문에 테스트 할 수 있는 로버의 크기가 한정되어 있고 수 미터 길이의 장거리 운전 중에 발생할 수 있는 문제에 대해서는 테스트할 수 없다는 단점이 있다. 이러한 토조 형태의 테스트 베드는 주로 휠의 구름성 등 로버의 요소 기술에 대한 평가를 수행하기 위하여 주로 사용되며, 크기가 작아 제작이 용이하고 다양한 종류의 데이터를 얻을 수 있기 때문에 여러 연구에서 활용되었다.
한편 Fig. 5(b)와 같이 필드 형태의 테스트 베드의 경우 큰 크기의 경사를 제어하기 쉽지 않고 한 번 채워진 토양을 변경시키며 실험을 하기 어려운 단점을 가지고 있다. 하지만 토조 형태의 베드와 달리 장거리 운전 과정에서 발생할 수 있는 문제 상황을 구현할 수 있고 길이가 1m 이상인 중형 크기의 로버의 주행성을 평가할 수 있는 장점이 있어 달 탐사를 위한 로버의 개발이 활발해진 현 시점에서 테스트를 위한 수요가 증가할 것으로 예상된다.
NASA Glenn Research Center에서 개발한 SLOPE(Simulated Lunar Operations)는 가장 대표적인 필드형 테스트베드이다. SLOPE는 1) 극단적인 주행 난이도 평가를 위하여 침하성 높은 fillite로 채워진 토조, 2) Fig. 6은 Glenn Research Center에서 개발한 인공 월면토 GRC-1로 채워진 토조, 3) 등판 각도를 조절할 수 있는 토조 등 3가지 토조로 구성되는 로버 테스트 베드이다. 다양한 종류의 로버가 SLOPE에서 테스트 되었으며 현재는 등판 시험에 대한 레퍼런스 필드로써 활용되고 있다. 그 외에 화성 탐사 로버의 주행성 테스트를 위하여 California Institute of Technology에서 활용된 등판 시험장, 화성 탐사로봇 스피릿호가 크레이터에 빠져 이동 불능 상태가 되었을 때 탈출 시나리오 테스트를 위하여 Jet Propulsion Laboratory에서 임시적으로 만든 테스트 베드 등이 있다.
이상에서 살펴본 테스트 베드는 모두 상압 및 상온의 환경에서 운영된다. 실제 달 환경에서와 유사한 모빌리티 성능을 평가하기 위해서는 진공도 및 온도의 조건의 유사성이 전제되어야 한다. 온도 변화에 대한 기기 장치의 내구성, 극한 조건에서의 방열 억제에 따른 열 안정성, 유체 사용 제한을 적용한 설계 등을 정확히 평가하기 위해서는 이러한 조건이 반영된 테스트 베드의 개발이 필수적이다.
4. 탐사 로버 등판 시험장 설계
4.1 경사각도 조절
기본적으로 로버의 경사면에서의 이동성을 테스트하기 위한 경사면 시험환경으로 최소한의 이동거리를 확보하여야 하며, 테스트 장비의 폭을 고려하여 충분한 사이즈를 확보하여야 한다. 또한 테스트 장비의 기동에 따른 달 토양에 미치는 영향을 알아보기 위해 충분한 깊이를 가져야 한다. 이러한 경사면 시험환경 장비는 사이즈 및 달 토양의 밀도를 고려할 때 고중량이므로 설계 시 그에 따른 고려가 필요하다.
Table 1의 경사면 조절을 위한 컨셉은 설계 방식에 따라 도르레 컨셉(Pulley System), 시저스 컨셉(Scissors system), 시소 컨셉(Seesaw System), 무게추 컨셉(Counter mass system)으로 구분할 수 있다. 크레인이나 호이스트를 이용한 도르레 컨셉은 안정적이고 구조가 심플하며 고중량의 토조를 들어올리기 위한 대용량의 크레인 설비가 필요하다. 스크류와 링크를 이용한 시저스 컨셉은 중심축 힌지를 기준으로 양측에 하중을 고르게 분산하여야 하며 소일 박스의 경사면 구현 시 바닥면, 중간축, 경사 상부의 하중 부담이 크다는 단점이 있다. 가운데 힌지를 통해 무게 균형을 통하여 각도를 조절하는 시소 컨셉은 구조적 안정성 및 이동성을 고려하여 정밀제어가 필요하며 유지관리에 따른 제어시스템 구축이 필요하다. 경사면에 상응하는 무게를 주어 평지에서 경사면 주행을 볼 수 있는 무게추 컨셉은 단일 방향으로 로버의 이동이 제한된다. 각각의 컨셉은 장단점이 있으며 이러한 컨셉들의 특성을 고려하여 최종 경사면 컨셉을 수립하였다. 최종적으로 선정한 컨셉은 기본적으로 시소 컨셉을 따르나, 미니 호이스트 등을 활용하여 경사면 조절에 보조 장치로 활용하는 컨셉을 선정하였다. 이 경우 비용은 다소 증가하나 시소 컨셉과 도르레 방식의 단점을 상호 보완할 수 있다.
Table 1.
Concept of rover climbing test site
| Flat environment | Slope environment | |
|
Pulley system | 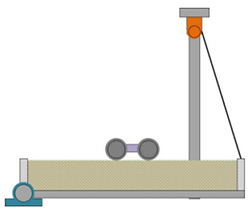 | 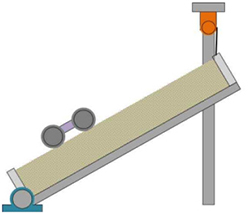 |
|
Seesaw System |  | 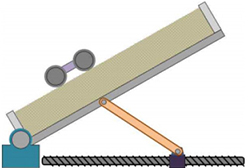 |
|
Scissors System | 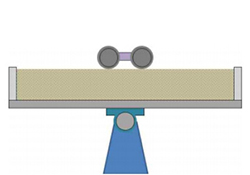 | 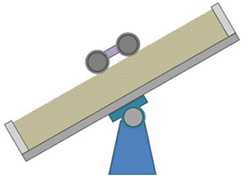 |
|
Counter Mass System | 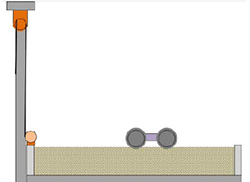 |  |
4.2 탐사 로버 등판 시험장 설계
달 크레이터 내부를 오르내리는 로버의 실험을 수행하기 위해 탐사 로버의 크기를 고려하여 4m의 길이와 3m의 폭을 갖는 Soil Box를 설계하였다. 등판 시험장 설계 제원 는 Table 2와 같다. 또한 탐사로버의 이동에 따른 토양의 거동을 분석하기 위해 충분한 깊이가 필요하므로 Soil Box의 깊이는 50cm로 하였다. 달 토양의 밀도는 각각의 상태에 따라 차이가 있지만 약 1.5t/m3 ~ 2t/m3이므로 위에 선정한 Soil Box에 적재되는 인공 월면토의 무게만 고려하여도 약 4.5t ~ 6t의 무게를 갖는다. 따라서 Soil Box 및 경사면 조정을 위한 장치는 이러한 하중을 버틸 수 있도록 설계되어야 한다. 또한 미세한 먼지입자로 이루어진 인공 월면토의 특성상 실험 준비 및 실험 중 대기로 날아가 손실되는 토양의 양이 많으며 이는 단순히 토양의 손실뿐만 아니라 실험자의 건강 문제 및 주변 환경이 오염되는 2차적인 문제가 있으므로 이를 막아줄 수 있는 Dust Cover를 포함하여 설계하였다. 또한 Dust Cover를 통해 실험수행을 위한 부가적인 장비의 장착이 가능해지며(로버의 거동 분석을 위한 카메라 및 센서류) 상하 조절을 위한 크레인/호이스트의 거치대로 활용이 가능하다.
Table 2.
Space planet exploration rover climbing test site design
| Capability | |
| Soil Box Size | 4,000mm × 3,000mm × 500mm |
| Soil Weight | 10Ton |
| Slope angle | 30° |
| Lifting height | 1,000mm |
달 경사면 시험장치의 부재는 향후 추가적인 장비 장착의 용이성 및 시공성을 고려하여 알루미늄 프로파일을 사용하였으며, 주된 힘을 받는 중앙 힌지부는 직경 50mm의 강철봉과 베어링을 조합하여 충분한 하중에 버틸 수 있도록 하였다.
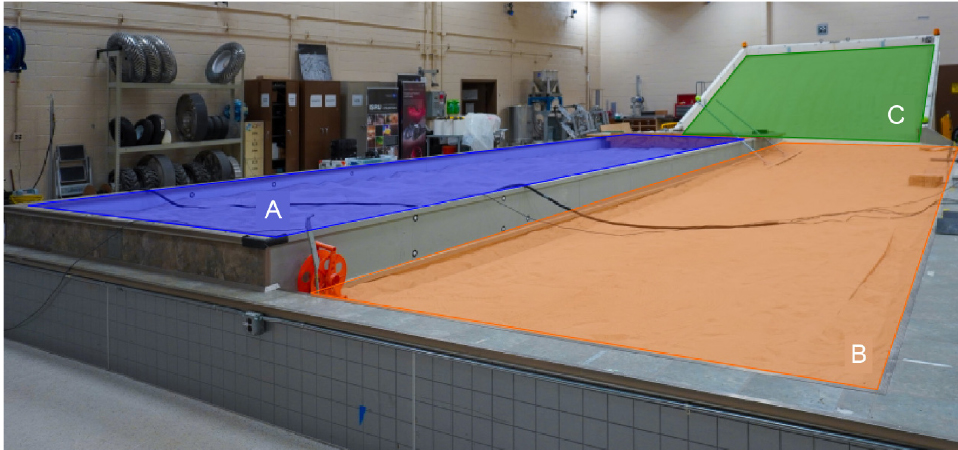
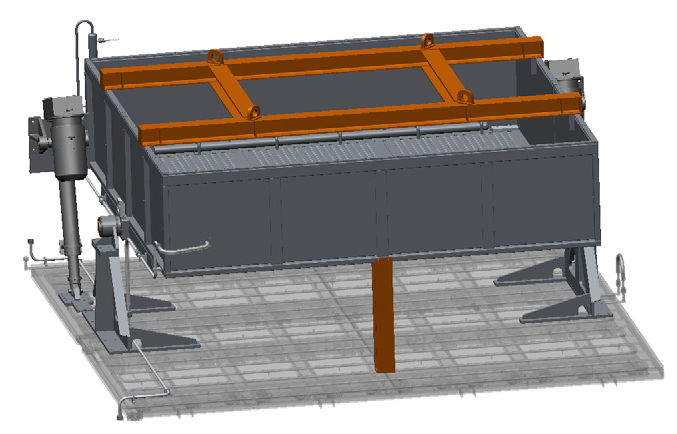
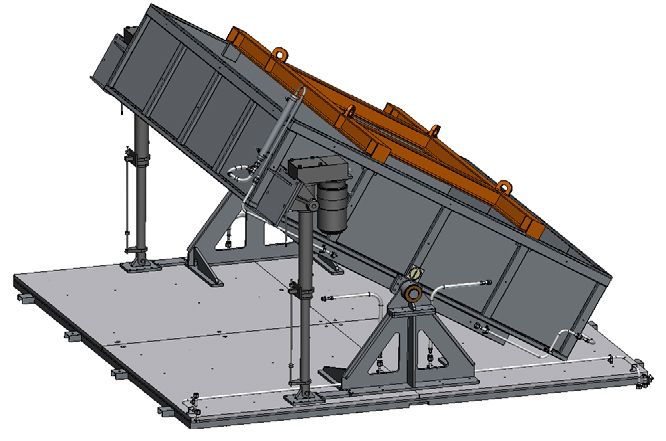
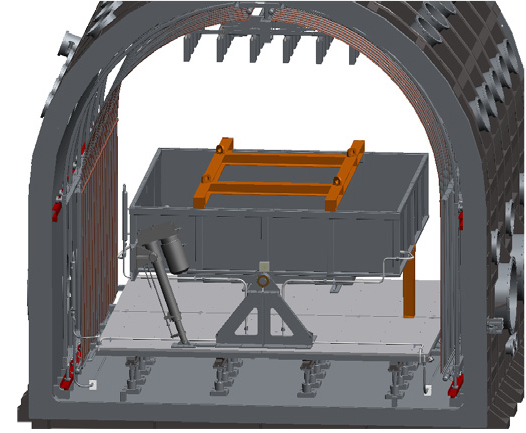
Fig. 7은 등판시험장을 수평으로 거동하여 탐사로버가 지반과 바퀴의 마찰특성을 분석하기 위하여 디자인 하였다. Fig. 8은 행성 탐사 로버의 등판시험 능력을 평가하기 위하여 하부 실린더를 이용하여 경사 사면을 모사, Fig. 9는 달 환경을 모사할 수 있는 진공 챔버에서 로버의 주행성능평가를 할 수 있게 디자인하였다.
5. 결 론
탐사 로버 등판 시험은 경사면 주행 시 경사면의 각도에 다른 로버의 등판 능력 및 극한의 우주 환경에서 기계적 결함을 검증하는 실험이다. 등판 시험장 설계에 영향을 미치는 주요 인자로는 경사각도의 변화, 경사면을 이동하는 로버의 질량 변화 및 로버의 바퀴 직경, 바퀴 패턴 등이 있다. 이러한 각각의 변수에 따라 측정하는 데이터들로는 앵커와 연결된 와이어의 장력 측정 및 경사면을 이동하는 로버의 슬립율을 구할 수 있다. 지형 변화에 대응되는 구동 면의 물리적 현상에 따른 침하 및 슬립, 마찰력을 측정하며, 실제 로버의 주행 시 나타나는 거동에 대응되는 바퀴와 지형사이의 물리적 현상을 확인할 수 있다.
(1)우주 행성 탐사 로버 등판 시험장은 달 유사환경 시험 시설의 일부로써 향후 한국의 달 표면 탐사 및 우주행성 탐사를 위한 기반시설로 활용할 수 있다. 또한 달 탐사의 주요 목적 중 하나인 크레이터 내부 탐사 및 다양한 환경 및 지형에 적용 가능한 유사 환경을 구축하기 위한 기초시설로써 인공 월면토를 활용한 로버의 이동에 따른 달 토양의 거동 확인, 앵커와 와이어를 활용한 경사면 등판 및 하강 시험, 추가적인 실험장비 조합을 통한 Single Wheel Test Bed로 활용이 가능할 것으로 예상된다. 이러한 시험 환경의 구축은 실질적인 달 탐사 로버를 위해 반드시 선행되어야 한다. 달과 같은 우주 환경에서 사용해야 할 로버의 설계 및 제작을 위한 기반시설일 뿐만 아니라 우리나라의 달 탐사를 위한 상징적인 시설이 될 수 있을 것으로 기대된다.
(2)우주 행성 탐사를 위해서는 다양한 지형에서의 주행이 적합한 차세대 로버의 개발이 중요시 되며 특히 얼음이 존재할 것으로 판단되는 달의 극지방 접근을 위해 경사면 30° 이상에서의 주행도 가능해야 한다. 또한 현장의 샘플 채취 및 운반을 위해서는 임무 목적에 적합한 탑재체와의 연계도 고려해야 하며 이에 따라 장비의 구조 및 규격이 변화된다. 이에 따라 다양한 임무와의 연계성 및 국내외 연구진과의 교류를 통해 요구 조건을 파악해야 할 필요가 있다. 특히 우주에서의 실제 장비 운용의 사례 또는 과학적인 데이터가 매우 부족하기에 탐사 지역의 환경을 모사한 지구상의 시험환경을 구축하여 시험을 하고 모델을 정립하여야 하며, 향후 이 데이터와 우주에서 운용 시 발생되는 실제 데이터를 비교하여 모델을 수정하고 시험환경을 구축하여야 한다.
(3)로버의 주행성능에서 가장 기본이면서 절대적인 영향을 미치는 것이 로버의 바퀴이다. 달 토양의 전단 강도가 높은 이유는 상대 밀도가 높아서이지 그 자체의 입자가 크고 단단하여서가 아니다. 이에 따라 고운 흙 입자에서 바퀴가 얼마만큼의 마찰과 추진력을 얻을 수 있는지는 로버 주행에 있어서 핵심적인 변수 역할을 한다. 또한 지구상에서의 최적화된 도로가 아닌 오프로드를 주행하여야 하므로 이러한 예측 불가능한 지형에 유연하게 대처할 수 있는 바퀴의 설계 및 이러한 변수를 도출할 수 있는 실험 시설 설계가 기본적으로 요구된다.
(4)우주 행성 탐사용 로버는 구동장치 및 주행 알고리즘과 조합을 이루었을 때 최적의 주행성능을 도출 할 수 있다. 이에 유사한 물성치를 갖도록 준비된 Test Bed에서 모터의 출력, 기어비, 주행 알고리즘을 시험하여야 하며 시험 결과를 바탕으로 세부적인 사항들이 수정·보완 되어야 한다. 특히 경사면에 따른 주행성능과 인공 월면토의 밀도 및 물성에 따른 주행성능이 가장 중요한 사항이기에 이 요인들을 Test Bed의 구축에 적용하여야 한다. 이 경우 모터의 출력, 회전수와 로버가 움직이는 운동을 센서로 계측하여 비교분석할 수 있으며 이를 통해 최적의 조합을 찾아 로버의 세부사항을 결정하는 연구가 요구된다.
