

1. 서 론
2. 광파기 기반 댐 변위 모니터링
2.1 연구대상 댐
2.2 변위 측정 방법
3. 오차 발생 원인
3.1 측정오차
3.2 기계오차
4. 개선방향 및 계측결과
4.1 기존 댐 변위 계측결과 패턴
4.2 개선방향
4.3 기계점의 변화 패턴
4.4 목표 시준점의 변위 패턴
5. 보정 절차 및 결과
5.1 보정 절차
5.2 보정 결과
6. 결 론
1. 서 론
최근 기후변화 및 댐 노후화에 따른 댐 안전관리의 중요성이 대두되고 있으며, 댐은 생활・공업・농업용수의 공급, 전력생산, 홍수조절 등의 중요한 기능을 하는 국가 기반시설물이다. 따라서 이러한 시설물에 피해가 발생하였을 경우 많은 인명 및 재산피해를 가져올 수 있기 때문에 설계뿐만 아니라 유지관리가 중요한 요소가 된다. 댐과 같은 구조물은 설계와 관리에 만전을 기하더라도 예기치 못한 자연재난에 의해 붕괴되어 막대한 인명 및 재산피해를 일으키는 경우가 빈번히 발생하고 있다. 예를 들어, Jansen (1983)에 의하면 1900년대 미국, 이탈리아, 프랑스, 인도 등에서 약 200여개의 댐들의 붕괴로 인하여 11,100명 이상의 인명피해가 발생하였으며, 국내에서도 1961년 전북 남원에서 효기리댐(흙댐)의 붕괴로 인하여 100여명의 사망자가 발생(Chang et al., 1998)하였다. 1996년과 1999년에는 2회에 걸친 연천댐 붕괴사고로 많은 인명 및 재산피해가 발생하여 경제・산업적으로 막대한 피해를 초래하였다. 따라서 댐의 안정성을 위협하는 영향들을 사전에 방지하는 것은 중요하며, 이를 위해서는 기존 댐에 대한 효율적인 댐 안전 계측 모니터링 등 그 안전성 여부를 평가할 수 있는 체계의 구축으로 댐 제체에 예기치 못한 문제가 발생하였더라도 신속한 원인 규명 및 조치로 그 피해를 최소화 할 수 있도록 하여야 한다. 예를 들어, 일본의 설계기준(Japan Institute of Country-ology and Engineering, 2008)과 미국의 설계기준(FERC, 1991)에 의하면 콘크리트댐과 필댐에 대해 유지 및 안전관리를 위해 제체의 “변위”를 필수 계측항목으로 지정하여 계측 빈도 및 분석방법에 대해서 기술하고 있다. 국내에서는 2000년대 중반이후 광파기 기반 댐 변위 계측시스템을 구축하여, 실시간으로 자동계측을 수행 중에 있다. 그리고 Choi et al.(2013)은 구조물 변위 계측을 위해 범지구위성항법시스템(GNSS)을 활용하였고, Kim et al.(2007)은 디지털 영상을 이용한 구조물의 3차원 변위 계측에 활용하였다. 이와 같이 최근에는 위성항법시스템(GPS) 또는 고해상도 이미지 등 기반으로 변위 계측시스템이 개발되고 있으나, 기존 광파기 계측시스템과 비교하여 정확도 및 신뢰성의 검증이 불명확하여 도입은 지연되고 있는 실정이다.
본 연구에서는 기 개발되어 적용중인 광파기 기반 댐 변위 자동계측의 신뢰도를 개선하기 위한 방법의 개선을 제시하고 있다. 광파기의 특성상 발생하는 거리 및 측각에 따른 측정오차를 없애는 것은 불가능하기 때문에 본 연구에서는 무인 자동화시스템에 의해 발생하는 오차를 보정하는 방법을 제안하였다. 즉, 댐 변위자동계측 시스템을 위해 하루에 수차례 광파기가 회전을 하면서 목표 측점을 계측하는 과정에서 발생하는 기계의 위치 오차가 발생하게 되며, 이를 목표 시준점의 변위량 보정을 통해 그 신뢰도를 개선하고자 한다.
2. 광파기 기반 댐 변위 모니터링
2.1 연구대상 댐
연구의 대상 댐은 한국의 대표적인 다목적 댐의 하나로 해당 지역의 생활 및 공업용수를 안정적으로 공급하고 있고, 홍수조절에 의한 하류지역의 홍수피해 경감에 큰 역할을 하고 있다. 댐 형식은 콘크리트 표면 차수벽형 석괴댐(Concrete Faced Rockfill Dam)으로 높이 약 70m, 길이 약 500m, 유효저수용량은 672백만m3으로2000년 초반에 준공되었다. 하루 용수 공급량은 178만m3이고 137백만m3의 홍수조절용량, 년 209백만 kWh의 발전을 수행하고 있다. Fig. 1은 연구대상 댐의 평면도를 나타내고 있다. 그림에 나타낸 바와 같이 댐 우안 1개의 광파기에 의해 상부 변위점(C1∼C8) 및 하류사면 변위점(D1∼D14)를 1일 3회 자동 계측하여 댐의 변위를 자동으로 계측하고 있다. 여기서 B1∼B3는 기준점을 나타내며, 광파기의 위치를 정밀하게 측량하여 산정하기 위해 설치하였으나, 최초 초기 위치 설정시 사용하고, 현재는 광파기 계측에 문제점이 도출되었을 경우 현장점검을 통한 광파기 검보정시 사용되고 있다.
2.2 변위 측정 방법
Fig. 2는 댐 변위에 사용되는 좌표 측량의 일반적인 방법에 대해서 나타내고 있다. Fig. 2(a)에서처럼 댐 변위 관측을 위해 첫 번째로 후방교회법에 의해 기지점인 B1∼B4의 기준점을 이용하여 광파기 위치 좌표를 구하고, 광파기 위치(좌표)를 절대 값으로 간주하여 Fig. 2(b)에 나타난 바와 같이 미지점인 목표 시준점의 좌표를 측량하여 초기 좌표와 비교하여 변위량을 산정한다. 다시 말해, 일반적으로 일단 기준점을 통해 광파기의 위치가 정해지면 장비 또는 계측에 문제가 발생하지 않으면 초기 광파기의 위치의 좌표는 불변의 절대치로 간주하여 목표 시준점의 좌표를 측정하여 변위를 계산하게 된다.
3. 오차 발생 원인
3.1 측정오차
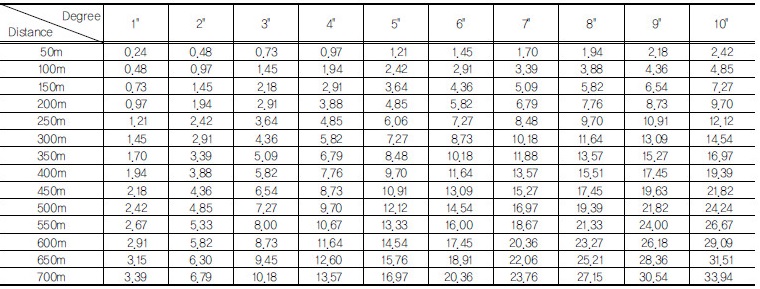
광파기에 의한 목표 시준점의 좌표를 측정함에 있어서는 수평 및 연직경사 등 거리, 측각에 따라 오차가 발생하며, 이는 거리가 멀어질수록 증가하는 경향이 있다. 하지만 실제 댐 변위계측에 있어서는 또 다른 중요한 오차가 발생하게 된다. 이 오차는 일정시간동안 무인 자동 계측을 위해 프로그램에 의해 광파기를 제어하여 주기적인 회전을 통해 목표 시준점의 좌표를 측정하는 과정 및 광파기 측정 장치(받침대 등)의 노후 등에 따라 광파기 자체의 기울어짐 등의 오차, 기후(온도 및 기온)변화에 따른 오차 등 추가적으로 발생한다. Table 1은 정밀도가 “1±1.0ppm, 1초”인 광파기를 대상으로 일반적인 삼각측량에 의해 광파기의 수평각도 및 목표 시준점의 거리에 따른 변위량의 변화를 나타내고 있고, Fig. 3은 이를 그림으로 나타낸 것이다. 광파기에서 1초의 변화가 발생되었을 때는 50m의 거리에서는 0.2mm의 변위, 700m의 거리에서는 4mm의 변위가 발생하며, 10초의 변화가 발생되었을 때는 50m와 700m의 거리에 대해서 각각 2.4mm와 34mm의 변위가 발생하게 된다. 즉, 광파기의 1초의 변화를 1초의 오차로 간주하면 각각의 변위들을 측정오차로 간주할 수 있다. Fig. 4는 거리오차에 대한 모식도를 타나내고 있고 그림에서 나타낸바와 같이 거리가 멀어질수록 측정오차가 증가하여 변위 폭이 증가하는 것이 일반적인 현상이며, 이는 위에서 언급한 것처럼 오차로 간주되는 각 변화가 거리가 멀어질수록 그 오차는 증가하는 것을 의미한다. 따라서 광파기의 오차가 목표점의 변위로 발생되기 때문에 이에 대한 오차의 발생여부 확인 및 보정이 필요하다.
Table 1. Displacements measured by total station according to various degree and distance (unit : mm)
 |
3.2 기계오차
Fig. 5는 광파기에 의한 댐 변위 측량의 구체적인 개요도를 나타내고 있다. 그림에서 보는바와 같이 광파기로 측점(P1, P2)의 변위를 측정하기 위해 우선, 광파기 자체 기능으로 내부에서 임의의 기준 수평선을 선정하고, 이 기준선으로부터 기준 수평각 H(θ)과 수직각V을 계산하고, 광파기로부터 사거리 S를 이용하여 측점의 좌표를 구하게 된다. 따라서 이러한 항목들은 목표 시준점의 좌표를 측량하는데 중요한 요소가 된다. 하지만 댐 변위 자동계측시스템에 사용되는 광파기의 제어프로그램에서는 그 목표 시준점의 변위 산정을 위한 H, V, S에 대해서 기록하고 관리하지 않고 있다. 따라서 원인불명의 이상계측이 발생하였을 때는 기본적인 원시자료(raw data)의 분석이 불가능한 실정이다.
4. 개선방향 및 계측결과
4.1 기존 댐 변위 계측결과 패턴
연구대상 댐은 실시간 안전관리를 위해 댐 변위거동의 감시를 위해 1일 3회를 자동으로 계측 기록하게끔 설정되어 운영 중에 있다. Fig. 6은 대상 댐에 광파기 기반 댐 변위 자동계측시스템이 구축(2007년 6월)된 이후 2014년 8월까지 약 7년 동안 가장 근거리(50m)에 위치하는 측점인 C1에 대한 계측결과를 나타내고 있다. 변위는 3성분(N, E, Z)으로 N은 댐 상・하류방향, E는 댐 축 방향, Z는 수직방향으로 댐의 침하량을 의미한다. 가장 근거리임에도 불구하고 변위 자동계측시스템이 구축되고 2~3년 이후로 갑작스런 변위를 나타내고 있다. 댐 축 방향을 의미하는 E는 순간적으로 8mm~10mm의 변위가 발생하여 지속적으로 증가하는 추세를 나타내며, 침하량(Z)은 -20mm 등의 이상 계측을 보이고 있다. 하지만 현장점검 결과 댐의 상태는 변화가 없는 상태였다. 이는 실제 댐의 변위가 아니라 광파기 등에 의한 계측오차로 추측 가능하다. 그리고 댐 상・하류방향인 N은 다른 방향의 변위처럼 갑작스런 큰 변동은 없지만, 5mm정도의 변동 폭으로 다른 방향과 비교해서 상대적으로 크게 변화하고 있다. 또한, 각각의 방향에 따라 주기적인 변동을 보이는 것은 계절 등의 기후(온도, 습도 등)에 따른 변화로 볼 수 있다.
본 연구에서는 이러한 원인불명의 이상 계측을 규명하고 해결방안을 모색하기 위해 2014년 10월에 현장시험을 수행하였다. 원인규명을 위해 목표 시준점 측량 전에 기존에 설치된 기준점(3개소)을 측정하여 광파기 위치를 확인하고, 위에서 언급한 변위계산에 사용되는 기준 수평각(H), 수직각(V) 등을 기록하고 관리하였다.
Fig. 7은 본 연구에서 기준 수평선을 B1으로 고정하여 목표 시준점 측량 전에 기준점(B1~B3)의 측량을 통해 기준 수평각 및 수직각의 변화를 관찰한 결과를 나타내고 있다. 그림에 나타내는 바와 같이 기준 수평각과 수직각은 일정하게 유지되는 것이 아니라 조금씩 변화하는 것을 알 수 있다. 특히, 기준 수직각보다 수평각 H(θ)이 크게 변화하는 것을 알 수 있고 최대 20초의 변화를 나타냈으며, 이러한 변화량이 목표 시준점을 측량할 때 오차로써 포함된다는 것이 판단가능하다. 본 연구에서는 이러한 오차를 기계오차라고 하고 이 오차의 보정방법을 제시하고자 한다.
4.2 개선방향
Table 2는 기존 측량 방법과 본 연구에서 제안하는 방법을 비교한 것이다. 보는 바와 같이 기존의 측량 방법에서 발생한 원인불명의 오차를 확인 및 보정해 주기 위해서 기 설치된 기준점(3개소)를 활용하여 목표 시준점의 변위 측량이 필요하다. 이러한 과정을 통해 각종 사고시 그 원인분석을 보다 정밀하게 수행할 수 있다.
4.3 기계점의 변화 패턴
Fig. 8은 2014년 10월 17일부터 동년 10월 29일까지 연구 대상 댐 변위 관측시의 광파기 자체 변위를 나타내고 있다. 이 변위량의 관측을 위해 Fig. 1에 나타나 있는 B1~B3의 기준점을 이용하여 목표 시준점의 측량 전에 광파기 위치를 측량하여 기존 초기치와 비교한 변화량(변위)를 도시한 것이다. 그림에 나타낸 바와 같이 광파기의 위치가 초기치와 상이하게 매시간 변화하는 것을 알 수 있고, 최대 20mm까지 변위가 발생함을 알 수 있다. 이는 본 연구에서 수행된 기준점의 측량으로 인해 그 오차가 기계의 변위로 관측된 것이다. 기존의 방법에서는 기계점이 불변으로 가정하여 초기점을 사용하기 때문에 이와 같은 오차가 발생하지 않는다. 하지만, 지진, 주변 발파, 노후에 따른 광파기의 기울짐에 의해 실제로 기준점이 미세하게 변화하였을 경우는 현재의 방법으로는 그 사실을 인지하기는 힘들 것이고 목표 시준점의 변위 측량시 이와 같은 변위가 포함되어 변위로 포함되게 된다. 요약하면, 광파기의 위치를 불변으로 간주하는 것 보다는 기준점 측량을 통해 광파기의 위치를 확인하고 그 거동을 판단하는 것이 중요하다. 이러한 오차는 정확한 측량기록을 통해 보정이 가능한 오차이다.
4.4 목표 시준점의 변위 패턴
Fig. 9는 광파기로 부터 50m(C01), 140m(D07), 255m(D10), 370m(D12)에서의 변위량과 광파기 자체의 변위를 비교한 것이다. 앞서 설명한 것처럼 본 연구에서는 광파기의 위치 및 기준 방위각의 변화를 관찰하기 위해 목표 시준점을 관측하기 전에 기준점(B1~B3)을 측량하여 광파기의 위치변화 및 기준 수평각 등을 기록하여 변화 양상을 관찰하였다. 그 결과 모든 목표 시준점에서 계측된 변위 양상은 광파기 변위와 동일한 패턴을 나타내는 것을 알 수 있고 거리가 멀어질수록 광피기 변위와 이격되어 표시되는 것을 확인할 수 있었다. 이는 광파기 위치 변화가 측점의 변위에 포함되었음을 의미한다. 따라서 이러한 패턴은 실제 댐 거동과 무관하기 때문에 보정해 줄 필요가 있다. 기존에는 광파기 좌표를 불변으로 가정하여 초기치를 이용하였으나, 광파기 위치의 변화 및 계산과정에 이용되는 측정값(기준 수평각 및 수직각 등)의 관측을 통한 신뢰선 개선을 위해 목표 시준점 측량전 기준점을 측량하며 발생한 오차이며, 이 오차의 해소를 위해 광파기 위치(좌표)를 가변적인 형태로 변환하는 것이 필요고 이 변위량 내에는 기준 방위각이 변함에 따라 발생한 오차가 포함되어 이에 대한 보정 또한 필요하다.
또한 이러한 방법을 통해 지진, 강풍, 주변 지역 공사에 따른 발파, 광파기 노후(기울어짐 등) 등으로 인해 기존에는 고려하지 않았던 광파기 자체의 변위 또는 광파기 내부의 시스템적인 오차(수평 및 수직각 등)의 감시 및 보정을 통해 실제 변위의 관측이 가능할 것으로 판단된다.
5. 보정 절차 및 결과
5.1 보정 절차
본 연구에서 밝혀진 광파기 위치 및 기준 수평・수직각의 미세한 변화가 목표 시준점의 변위로 포함되어 실제 변위와 무관한 측정오차로 댐 변위가 발생하였다. 이는 기존의 광파기 좌표는 불변으로 가정하고, 변위계산에 중요한 요소가 되는 기준 수평・수직각도는 고려하지 않고 수행된 변위 계측에 대해 각각의 항목은 가변적이라는 사실을 토대로 다음과 같이 오차 보정 절차를 수행한다.
1.목표 시준점의 변위 측량시 기준점(B1~B3)을 활용하여 광파기 위치 좌표(N1, E1, Z1) 및 변위 계산에 중요한 항목인 수평・수직각을 기록한다.
2.재측량된 광파기 좌표(N1, E1, Z1) 및 수평(H)・수직각(V) 이용하여 목표 시준점의 좌표를 측량한다.
3.최종적으로 목표 시준점의 초기 좌표와의 비교를 통해 댐 변위를 산정한다.
다시 말해서 본 연구에서는 목표 시준점 측량전 기준점(3개소)을 측량하여 광파기 위치 및 수평・수직각의 변화를 측량하여 최종 목표 시준점의 변위 계산시 변화된 광파기 위치 및 수평・수직각을 활용하였다. 이러한 과정은 이상계측시 그 원인규명을 위해 데이터 분석을 위해서도 필요한 항목이다.
5.2 보정 결과
Fig. 10은 위의 절차에 의해 산정된 거리별(50m, 85m, 140m, 255m, 370m) 목표 시준점의 보정 전후의 변위를 비교한 것이다. Fig. 10(a)는 가장 가까운 목표 시준점(50m)의 경우로 보정 전에는 최대 20mm의 변위가 보정후 약 ±5mm까지 감소되었고, 가장 멀리 있는 375m지점에서는 최대 18mm의 변위가 ±10mm 이내로 줄어든 것을 알 수 있다. 또한 거리가 멀어질수록 변위가 증가하는 것은 광파기 특성상 발생하는 거리 및 측각에 의한 오차이기 때문에 변동 폭이 동일할 경우는 이 변위량을 실제 변위라기보다는 측정오차라고 간주하여도 된다. 한편, 광파기 자체의 허용 오차(1±1.0ppm)가 존재함에도 불구하고 실제 현장에서는 기상(온도, 습도 등) 및 설치환경 등에 따라 이러한 광파기 자체의 오차는 의미가 없게 된다. 따라서 이러한 댐 변위의 관리를 위해서는 실제 현장에서의 허용오차범위를 설정하여 이상계측에 대해 관리하는 것이 필요하다. 아직 국・내외에서는 허용오차에 대한 규정은 없는 실정이다. 따라서 본 연구에서 수행된 계측결과 370m 이내의 거리까지는 허용오차를 10mm로 하여 관리하는 것이 필요할 것으로 생각된다.
6. 결 론
대상 댐은 광파기에 의한 댐 변위관측을 위해 1일 3회, 댐 제체에 설치된 목표 시준점을 자동으로 회전을 하면서 관측하는 시스템으로 수년간의 계측결과를 바탕으로 이러한 계측 시스템이 때때로 원인불명의 이상계측이 지속적으로 발생하는 것이 관찰되었다. 본 연구에서는 댐 변위 계측의 신뢰도를 개선하기 위한 방법에 대해서 기술하고 있다. 본 연구에서 밝혀진 결과는 아래와 같다.
(1)이상 계측 등 정확한 원인을 규명하기 위해서는 매 측량시 기준점(3개소)을 측량하여, 광파기 위치 확인 및 원시자료(raw data)의 기록이 필요하다.
(2)오차발생의 가장 큰 원인은 광파기 위치(좌표) 변화와 댐 변위량 계산에 중요한 항목인 기준 수평 및 수직각임이 밝혀졌다. 즉, 이러한 변화는 목표 시준점의 변위에 포함되어 실제 댐 거동과 무관한 이상계측이 생산되는 문제점이 발생하기 때문에 이를 보정할 필요가 있다.
(3)광파기 좌표 및 기준 수평・수직각을 가변적으로 적용한 결과 가장 가까이에 있는 C1지점(50m)에서는 최대 20mm에서 약 ±5mm로 그 변위가 감소되었고, 가장 멀리 있는 D12지점(375m)에서는 변위가 18mm에서 약 ±10mm로 감소하여 신뢰도가 크게 증가한 것으로 나타났다.
마지막 제언으로 최근 이상기후 및 잦은 지진, 광파기 설치환경(노후 등) 등으로 인한 광파기 위치가 미세하게 변화할 수 있고, 이러한 변화는 목표 시준점의 큰 변위로 발생하기 때문에 본 연구에서 수행된 방법들은 정확한 변위 산정에 필요할 것으로 판단된다. 또한 광파기의 정확한 위치 및 기준 수평・수직각의 선정을 위해서는 기존에 설치된 기준점을 가능한 가까운 위치로 고정시켜 기준점 측량에 따른 오차를 감소할 필요가 있다.
