

1. 서 론
2. IoT 센서와 AI 카메라를 융합한 급경사지 상태 분석 시스템 개발
2.1 IoT 계측센서 하드웨어 및 펌웨어 설계·제작
2.2 지반조건을 고려한 IoT 계측센서 기구 및 연계장치 시작품 제작
2.3 AI 영상 분석 알고리즘 설계
3. 급경사지 예·경보 솔루션 및 시스템 설계
4. 현장 성능 평가 및 검증
4.1 성능 평가 개요
4.2 성능 평가 결과
5. 결 론
1. 서 론
기후환경의 변화와 집중호우의 증가로 산사태 위험이 커지고 있다. 전 지구 기후모델 및 지역 기후모델 분석에 따르면, 한반도의 연평균 기온은 미래에 2∼4°C 이상 상승하고, 강수량 또한 증가할 것으로 보인다. 이러한 변화는 2030년대에 산사태 발생 가능성을 현재보다 크게 높일 것으로 예상된다. 실제로 ‘한국 기후변화 평가보고서 2020’에 의하면, 수도권의 극한 강수량이 20% 증가하며, 산사태 발생 확률은 5배로 증가할 것으로 예측되고 있다(Korea Meteorological Administration, 2020; Lee and Yoon, 2022).
우리나라의 국토 중 약 63% 이상이 산악 지역이며, 표층이 얇아 급경사지 붕괴에 매우 취약한 구조이다. 도시화와 도로 건설로 인하여 만들어진 인공비탈면, 석축, 옹벽 등과 같은 급경사지의 증가는 피할 수 없는 사회적 특징이 되었다. 이러한 현상은 다양한 지역에서 급경사지로 인한 재해 및 인명 피해를 초래하고 있다(Kim, 2017; Ministry of Public Safety and Security, 2016). 최근 10년 동안 전국에서 산사태로 인한 피해 면적은 총 2,586ha에 달하며, 복구에는 약 7,624억 원이 소요되었다(Korea Forest Service, 2024). 특히, 행정안전부 재해연보에 따르면, 2012년~2021년간 호우로 인한 피해는 인명피해 8월, 재산피해 7월에 집중되는 경향을 보인다(Oh, 2023). 2023년 7월에는 집중호우로 산사태와 같은 토사 재해로 인해 26명이 사망하고 2명이 실종되는 등의 인명 피해가 발생했다. 이에 대응하여 정부는 '토사재해 원인분석 및 인명피해 방지대책'을 발표하여, 예·경보 대피 체계 확립을 포함한 20개의 중점 추진 과제를 추진하고 있다. 또한, 생활권 주변의 사면붕괴 위험을 상시 감지 및 모니터링 할 수 있는 IoT 계측 시스템의 보급 범위를 확대하며, 도로 비탈면 설치 대상을 200개소에서 500개소로, 급경사지는 현재 212개소에서 붕괴 위험 지역 2,037개소 및 인명피해 우려 지역으로 집중 설치할 계획이다(Koo et al., 2023; Ministry of the Interior and Safety, 2023). 급경사지 모니터링 시스템은 대체로 단일 센서에 의존해 급경사지의 상태를 감지하는데, 센서의 한계로 오작동이나 데이터 정확성 문제가 발생하기도 한다. 예를 들어, 체적함수비 결과를 활용한 급경사지 거동 특성 분석(Kang et al., 2019), 지상 라이다 자료를 이용한 자연사면의 변위 모니터링(Park et al., 2010), 센서 변위 계측을 통한 급경사지 거동 분석(Jin et al., 2018) 등의 연구는 모두 단일 센서와 단일 데이터에 기반하고 있어, 센서에 문제가 생길 경우 데이터 해석 오류를 일으켜 잘못된 경보를 유발할 수 있다.
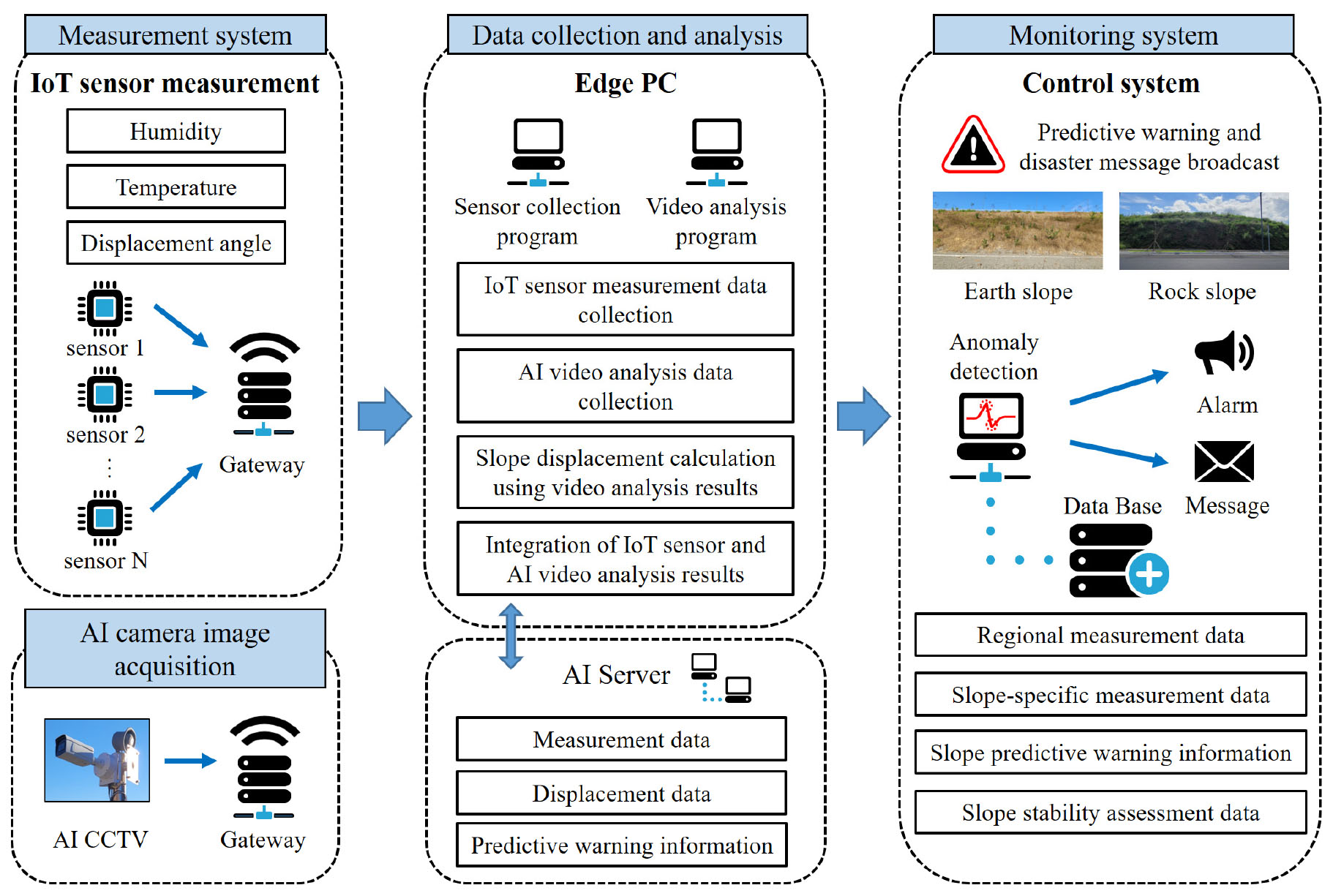
본 논문에서는 급경사지의 상태를 분석하기 위해 IoT 센서와 AI 카메라를 융합한 급경사지 상태 분석 시스템을 개발하였다. 급경사지 지반조건을 고려한 계측센서 하드웨어(hardware) 및 펌웨어(firmware) 설계, AI 기반 영상 분석 알고리즘 설계, 그리고 예·경보 솔루션 및 시스템을 제작하였다. 또한, 실제 급경사지에 개발 시스템을 적용하여 정확도(신뢰도)를 평가하였다.
2. IoT 센서와 AI 카메라를 융합한 급경사지 상태 분석 시스템 개발
2.1 IoT 계측센서 하드웨어 및 펌웨어 설계·제작
본 연구에서는 급경사지 변위 계측에 최적화된 계측센서 하드웨어를 설계하였다. 기존 계측 시스템보다 경제적이면서도 정확한 측정을 가능하게 하는 6축 센서와 3축 센서를 포함한 IMU(Inertial Measurement Unit) 센서를 활용하여 IoT 센서를 개발하였다. IMU 센서는 가속도계, 자이로스코프, 자력계로 구성되어 움직임과 방향을 정밀하게 측정할 수 있다. 특히, 가속도 센서는 기계적 충격이나 진동에 반응하여 가속도의 크기를 측정하며, 정지 상태에서는 드리프트 없이 정확한 각도 데이터를 측정할 수 있다(Jo and Jin, 2017). 또한, 지상센서와 지중센서를 함께 설치하여 정확도를 더욱 향상시켰다. 계측 데이터의 전송은 LoRa(Long Range) 통신 기술을 적용하여 전송률도 개선하였다. Fig. 1은 IoT 계측센서의 하드웨어 구성 설계를, Fig. 2(a)는 지상센서, Fig. 2(b)는 지중센서의 블록 다이어그램(Block Diagram)을 나타내고 있다.


또한, Fig. 3과 같이, ICM-42688-P(IMU), IIS2MDCTR(Magnetometer), 그리고 SGM-2000(Radio-frequency module)을 사용하였다. ICM-42688-P는 6축 미세 전기 기계 시스템(MEMS)을 활용한 고성능 관성 측정 장치(IMU) 센서이며, IIS2MDCTR는 3축 지자계 센서로 주변 자기장을 측정한다. SGM-2000은 계측 데이터를 전송하는 무선통신 모듈이다. 그리고, Fig. 4와 같이 지상센서, 지중센서의 PCB(Printed Circuit Board)를 별도 제작 및 검사하였다. 지상센서는 태양광 패널과 배터리를 동시 사용하는 구조를 최적화하기 위한 전원 회로를 구성하여 장기간 사용에도 전원 안전성을 유지하도록 설계하였다. 반면, 지중센서는 관경이 좁은 파이프 내부에 설치 후 매립 되어야하기 때문에 좁고 긴 직방형의 PCB 설계하였으며, 지중 매립으로 인한 펌웨어 업데이트 등의 자가 진단 및 업데이트의 어려움을 해소하는 방안으로 지상 센서를 통한 유지 보수가 가능하도록 설계하였다.


급경사지용 IoT 계측센서의 펌웨어 설계에서는 계측 오류를 최소화하기 위해 다양한 필터를 검토하고 테스트한 결과, 시간에 따른 IMU 센서의 누적오차와 외력 및 노이즈에 의한 오차를 최소화하기 위해 상보 필터(Complementary filter)를 적용하였다. 또한, 계측 데이터의 전송률을 향상시키기 위해 LoRa 통신 기술을 기반으로 한 펌웨어를 설계하고 IoT 계측센서 하드웨어를 제작하였다. LoRa는 장거리 전송, 저전력 소모, 저비트레이트 통신을 지원하는 무선 시스템으로, 사물 인터넷 인프라 솔루션으로 널리 사용된다(Augustin et al., 2016).
2.2 지반조건을 고려한 IoT 계측센서 기구 및 연계장치 시작품 제작
급경사지용 IoT 계측센서는 토사 및 암반 지반 조건을 고려하여 설계하였다. 계측센서들은 지반의 움직임을 실시간으로 모니터링하기 위해 사용되며, 정확한 데이터를 수집하기 위해서는 센서가 설치된 앵커가 안정적으로 지반에 고정되어 있어야 한다. 따라서 지반의 특성에 맞춰 토사 지반의 경우, 고정용 앵커가 지중에 근입 시 좌우로 움직일 가능성을 고려하여 기초 플레이트를 타원형 홀(Hole)로 설계·제작하였다. 반면 암반 지반의 경우, 기초 플레이트와 세트 앵커가 고정될 수 있도록 원형 홀(Hole)로 설계·제작하였다(Fig. 5와 6의 설계도 및 시작품 참조). Fig. 7은 계측센서 기구와 센서연계장치 시작품을 나타내고 있다.



2.3 AI 영상 분석 알고리즘 설계
대부분의 이미지 기반 객체 탐지 애플리케이션 개발에는 OpenCV 라이브러리를 사용하는 C++ 프로그래밍 언어가 널리 채택되어져 왔다(Bradski and Kaehler, 2000). 그러나 프로그래밍 언어와 라이브러리 대신 Aforge.NET 프레임워크(Kirillov, 2013)를 사용하기도 한다. Aforge.NET 프레임워크는 DLL 파일 확장자와 제어 컴포넌트(Controlled component)를 포함하는 사용하기 쉽고 이해하기 간단한 C# 프레임워크이다. 이미지 처리를 위해 필요한 다양한 클래스와 라이브러리를 제공하며, 이미지 처리, 컴퓨터 비전, 신경망, 유전 알고리즘, 기계 학습 등, 컴퓨터 비전과 인공지능 분야에서 활동하는 개발자와 연구자들에게 유용하게 활용될 수 있다(Kungcharoen et al., 2012).
본 연구에서는 AI 영상 분석 기법을 활용하여 AForge.net에 Glyphs recognition 알고리즘을 적용하였다. Glyphs recognition 알고리즘은 낮은 전력 소모와 프로그램의 안정성을 보장하는 기능을 제공한다. 또한, 정지 이미지와 영상 파일에서 광학적 글리프(Optical glyphs)를 찾아내어 인식하고, 그 위치의 좌표를 추정할 수 있다. 알고리즘 작동 개요를 Fig. 8에 나타내었다.

AI 카메라로 영상을 취득한 후, 불필요한 부분을 제거하여 파일 크기를 줄이고 컴퓨터(PC)의 부하를 방지하였다. 특정 위치에 타깃(Target)이 없는 경우, 해당 위험을 표시하도록 하였다. 타깃 부분의 영상을 획득한 후에는 이미지 전처리 과정을 진행하였다. 팽창, 침식, 팽창, 침식의 순서로 전처리 연산을 수행하여 영상의 엣지 부분을 강화한 후, Glyphs recognition 알고리즘을 사용하여 타깃을 검출하였다. 이러한 과정을 통해 타깃의 꼭지점 좌표, 회전 각도 및 방향, 그리고 초기 위치 대비 이동 거리 및 방향의 결과를 확인할 수 있었다. 타깃 인식률에 대한 결과는 Table 1에 나타내었다. 전체 영상에서 타깃을 검출할 경우보다 타깃이 있는 위치를 특정하여 범위를 축소 설정한 부분 영상에서 타깃을 검출했을 때 인식률이 향상되었으며, 야간에는 조명이 일정하여 검출시간이 짧고 인식률이 더 높았다(야간 전체인식률 70%, 부분인식률 99%).
3. 급경사지 예·경보 솔루션 및 시스템 설계
급경사지 예·경보 시스템 개발을 위한 필요 사양을 도출하며, LoRa 게이트웨이 연결을 통한 시리얼 통신, 송/수신 데이터의 화면 표시 및 로그 저장, IoT 장치 설정 및 설정값 확인, 모든 전문에 대한 ACK 송신으로 정상 전달 여부 확인, 그리고 체크섬(Checksum)을 사용한 전문의 무결성 확인 등을 포함한 게이트웨이 시스템을 Fig. 9와 같이 설계하였다.

Table 2는 Fig. 9 게이트웨이 시스템 설계 각 단계에서의 프로토콜 문자열을 나타내고 있다. PC에서 IoT 계측센서로는 Ack/nack, Command 프로토콜이 작동하며, IoT 계측센서에서 PC로는 Response, Data 프로토콜이 작동한다.
Table 2.
IoT measurement system protocol strings
게이트웨이 시스템을 중심으로 센서 수집, AI 카메라 분석, 뷰어 프로그램이 TCP/IP 서버를 통해 연동되며, 이 프로그램들은 각각 Edge PC 및 AI 서버 내 DB와도 연동되도록 게이트웨이 소켓 통신을 설계하였다.
Fig. 10은 예·경보 솔루션 및 아키텍처를 나타내고 있다. DB 시스템에 저장된 데이터를 기반으로 급경사지 붕괴를 예측하고, 예측 결과를 화면에 표시하고 로그로 저장하는 기능들을 포함하고 있다. IoT 계측센서 계측 및 AI 영상 분석 DB 시스템 설계를 통해 IoT 장치 등록, 데이터 확인, 현장 및 사용자 등록, 예측 데이터 처리, 카메라 정보 및 AI 분석 결과, 스트리밍 정보를 다룬다. 또한, IoT 데이터와 AI 분석 데이터를 융합하여 실시간 변위를 확인하고, 시계열 데이터를 저장한다.
4. 현장 성능 평가 및 검증
4.1 성능 평가 개요
IoT 계측센서와 AI 카메라를 융합한 급경사지 상태 분석 시스템의 실·검증을 위해 경상북도 소재 ㅇㅇ지식산업단지 현장 내 토사 비탈면 1개소, 암반 비탈면 1개소를 Test bed로 선정하였다. 암반 비탈면은 Fig. 11, 토사 비탈면은 Fig. 12에 나타내었다. 암반 비탈면은 높이 8.3m, 경사도 40°~55°이며, 5m 높이 1소단에 IoT 계측센서를 설치하였다. 토사 비탈면은 높이 15m, 경사도 29°~34°이며, 5m 높이 1소단, 10m 높이 2소단에 IoT 계측센서를 설치하였다. 성능 평가는 2024년 2월 23일부터 4월 2일까지 총 39일 동안 진행하였다.
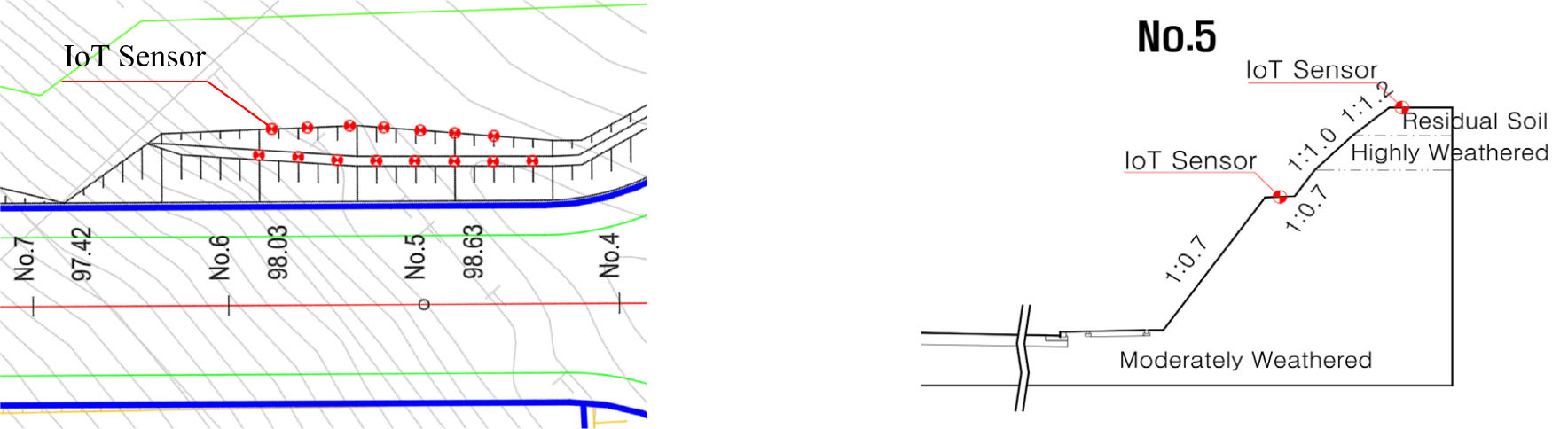

Fig. 13은 IoT 센서 장치 시공 단계를 나타내고 있다. 지주 설치, 태양광패널 설치, 와이어로프 설치, 지상센서부 설치, 지중센서 설치 순으로 시공하며, 시공성을 위해 경량 파이프를 적용하였으며, F/W 수정 등 유지보수를 위해 지중센서 케이싱을 별도로 적용하였다. 지주 고정 시 지반 조건에 따라 토사 비탈면 고정팩, 암반 비탈면 세트 앵커를 적용하였으며, 지주 고정 불량으로 인한 변위 발생을 방지하기 위해 3방향 와이어로프를 적용하였다. 설치 시 지중센서와 지상센서 간의 각도 오차가 최소화하도록 설치하였다.

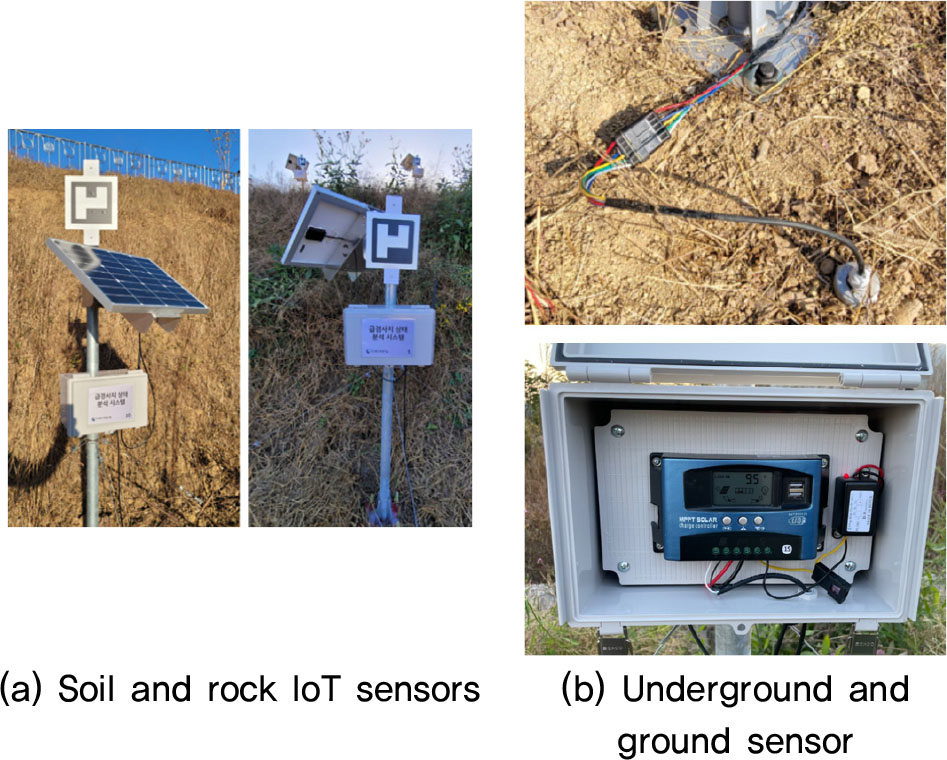
Fig. 14(a), Fig. 14(b)는 토사 및 암반 비탈면에 설치된 IoT 계측센서 사진, Fig. 14(c)는 지중센서, Fig. 14(d)는 지상센서를 나타내고 있다. Fig. 15는 AI 영상 분석 시스템을 설치한 모습을 나타내고 있다. 해당 시스템은 AI 카메라(Fig. 15(a))와 급경사지 상태 분석 시스템 중계기(Fig. 15(b))로 구성되어 있다. 마지막으로 Fig. 16은 IoT 센서가 설치 완료된 토사 비탈면 및 암반 비탈면을 나타내고 있다.


4.2 성능 평가 결과
급경사지 상태 분석 시스템 설치 후, 30초 간격으로 센서 데이터를 수집하였다. 지상센서와 지중센서의 시계열 데이터 비교·분석을 통해 오차를 확인한 결과, 허용 오차는 0.2°로 나타났다. 동시에 계측데이터 전송률을 확인하여 전송률 95% 이상임을 확인하였다. 또한, 성능 평가 기간 동안 일일 강우량은 23mm, 시간당 강우량은 3mm로 기록되었으며, 이러한 강우가 영상 인식률이나 센서 값에 영향을 주지는 않았다.
IoT 계측센서 성능 평가를 위해, Fig. 17(a)와 같이 3방향 와이어로프를 통한 IoT 계측센서 장치에 인위적인 변위를 발생시켜, 센서 측정값(Fig. 17(b))과 디지털경사계 측정값(Fig. 17(c))을 비교하였다. Table 3은 실측값을 기준으로 한 IoT 계측센서와 AI 영상 분석 결과 방법을 나타내고 있다. 평가 결과, 0.1° 이내로 실측값 기준 IoT 계측센서 계측오차가 발생하는 것을 확인하였다.

Table 3.
Comparison of IoT sensor readings and AI video analysis results based on actual measurements
5. 결 론
IoT 센서와 AI 카메라를 융합하여 급경사지의 상태를 분석하고 변위를 실시간으로 감지할 수 있는 새로운 시스템을 개발하고 성능을 평가하였다. 주요 연구결과는 다음과 같다.
1.경제적이면서도 정확한 IMU 센서와 LoRa 통신 기술을 결합하여 급경사지 계측에 적합한 IoT 계측센서의 하드웨어 및 펌웨어를 설계 및 제작하였다. 계측 오류를 최소화하기 위하여 상보 필터를 적용하여 시간에 따른 누적오차와 외력 및 노이즈 영향을 줄임으로써 변위 계측의 정확성과 효율성을 개선하고, 계측 데이터의 전송률을 향상시켰다.
2.실제 토사 및 암반 비탈면에서 성능 평가를 수행하여 시스템의 적용 가능성과 성능을 검증하였다. 계측센서 오차는 0.1° 이내로 유지되는 등 매우 높은 수준이었으며, 계측 데이터 전송률은 95% 이상으로 확인되었다.
3.AI 영상 분석 시스템은 Glyphs recognition 알고리즘을 적용하여 급경사지의 변위 감지의 정확도를 향상시켰다. 현장 성능 평가 결과, 야간 전체인식률 70% 이상, 부분인식률 99%에 이르러 높은 인식률을 보이는 등 다양한 조건에서의 효과적인 변위 감지가 가능함을 확인하였다.
4.예·경보 시스템의 아키텍처를 설계하여, IoT 계측센서 데이터와 AI 영상 분석 결과를 통합하고 실시간 각도 변화를 파악하여 급경사지 상태 분석이 가능한 시스템을 제안하였다.
향후 다양한 급경사지에 적용하여 완성도를 향상시키고, 실제 급경사지의 안전관리 및 유지관리에 활용될 수 있도록 개선할 필요가 있다.
