

1. 서 론
1.1 디지털트윈 정의
1.2 지반 구조물 디지털트윈 적용 사례 및 연구 목적
2. 지반 구조물 재해저감을 위한 디지털트윈 적용 제안
2.1 지반 구조물의 디지털트윈 제안
2.2 모델 구축 및 전처리
2.3 유한 요소 해석 및 수치 모델 구축
2.4 물성치 추정 및 보정 알고리즘
2.5 전단강도 저감법
3. 모형지반 구조물에 대한 개념 적용
3.1 모형 실험 개요
3.2 디지털트윈 절차 적용
4. 적용 결과 및 안정성 검증
4.1 변위 보정 결과
4.2 안전율 검증
5. 결 론
1. 서 론
1.1 디지털트윈 정의
디지털트윈은 물리적 실체와 가상 모델을 실시간 데이터로 결합해 양방향으로 상호작용하는 시스템으로, 단순한 디지털 모델링이나 일회성 시뮬레이션과 달리 지속적 데이터 동기화와 피드백을 통해 현실 세계의 상태를 가상공간에 재현한다(Fuller et al., 2020; Liu et al., 2021). 일반적으로 디지털트윈는 물리 세계–가상 세계–연결성의 3층 아키텍처로 구현되며, 센서 및 제어기(물리), 데이터 처리, 모델링, AI 및 ML(가상), IoT, 5G 및 클라우드(연결성)가 결합되어 측정 데이터가 가상 모델로 유입되고, 해석 및 예측 결과가 다시 물리 시스템의 의사결정으로 결합되는 폐루프(closed-loop) 구조를 이룬다(Botín-Sanabria et al., 2022). 이러한 구조적 특성에 기반해 디지털트윈은 단순 모니터링을 넘어 시뮬레이션–모니터링–평가–예측–최적화–제어를 아우르는 포괄적 운영 플랫폼으로 확장되고 있으며(Yao et al., 2023), 현실 세계의 복잡성과 불확실성을 데이터 기반으로 줄이는 데 핵심 역할을 수행한다. 디지털트윈 개념은 항공우주 및 제조 분야에서 출발하였다. 개념적 측면에서 Grieves and Vickers(2016)는 물리 시스템과 동등한 가상 모델을 상호작용의 매개로 활용하여 의사결정을 지원하는 구조를 제시하였고, Wang et al.(2019)은 이를 인간–사이버–물리 시스템(HCPS) 프레임워크로 확장하여 지능형 제조 구현 방안을 구체화하였다. 응용 측면에서는 항공기 설계–제조–운영–유지관리 전 주기에 디지털트윈을 도입함으로써 제조 공정 최적화와 예지정비(PHM)에서 뚜렷한 성과가 보고되었으며(Xiong and Wang, 2022), 제조 산업 전반에서도 제품 수명주기 관리(PLM)를 기반으로 설계–제조–서비스 데이터를 통합해 에너지 효율과 자원 이용을 최적화하는 프레임워크가 제안되고 있다(Zheng et al., 2018; He and Bai, 2020). 한편 응용 범위는 의료와 사회 인프라 영역으로도 확장되고 있다. 헬스케어에서는 장기 및 조직 수준의 생체 모델을 임상 데이터와 동기화하여 환자 맞춤 치료를 지원하는 연구가 진행 중이며, 심혈관 치료 분야에서는 실제 적용 사례가 축적되고 있다(Sun et al., 2023). 이러한 디지털트윈의 확산은 교통, 농업, 해양, 자동차, 제조 등 다양한 산업에서 운영 최적화, 위험 예측, 자원 관리 고도화로 나타나고 있으며, 스마트 시티, 에너지, 물류, 건설 분야에서는 AI와의 융합을 통해 데이터 기반 운영 패러다임 전환을 가속하고 있다(Qi et al., 2021). 요컨대 디지털트윈은 폐루프 동기화와 지능화된 분석을 통해 상태 모니터링–예측 및 최적화–사전 유지관리까지 포괄하는 핵심 인프라 기술로 자리매김하고 있다.
1.2 지반 구조물 디지털트윈 적용 사례 및 연구 목적
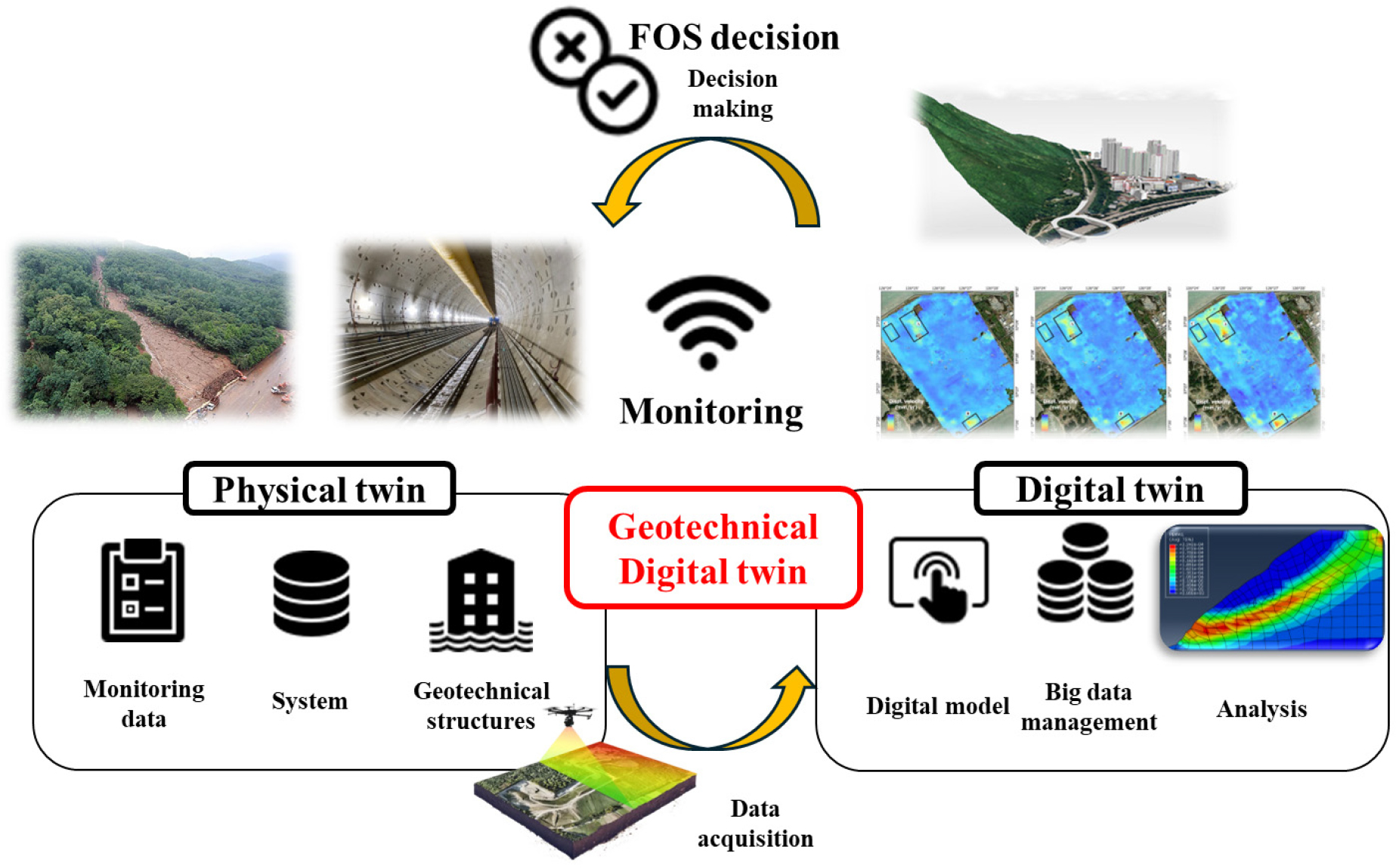
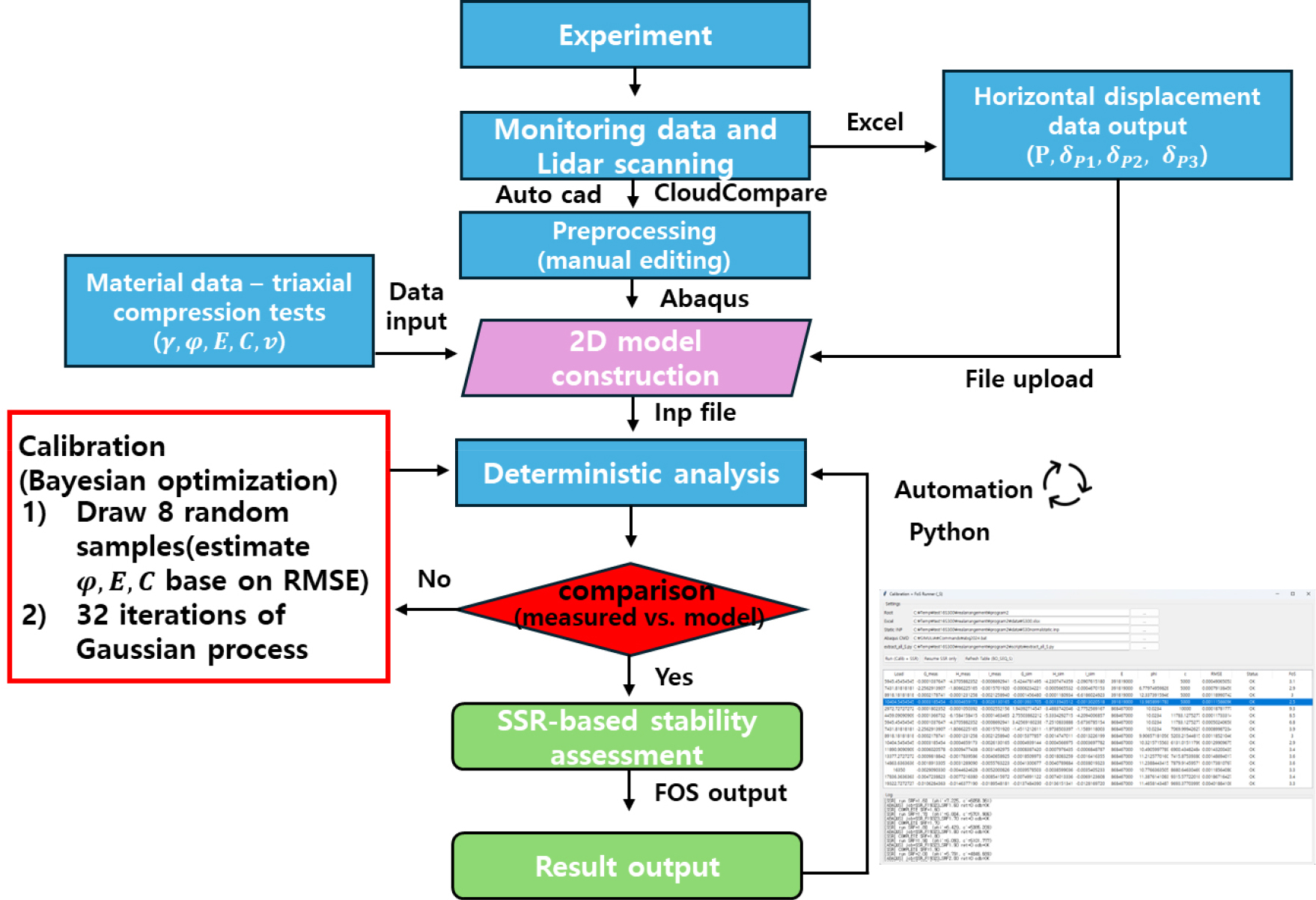
지반 구조물의 디지털트윈은 계측–데이터 수집–가상 모델–해석–의사결정이 순환하는 폐루프 구조로 구현된다. 즉, 사면, 터널, 댐과 같은 물리계에서 수집된 형상, 거동, 환경 데이터가 연결성 계층을 통해 가상공간으로 유입되고, 디지털 모델 및 수치해석 모듈에서 분석된 결과가 다시 현장 제어와 운영으로 피드백된다(Fig. 1). 이러한 구조는 단순한 시뮬레이션을 넘어 실시간 동기화와 피드백을 핵심으로 하며, 모니터링–모델 업데이트–평가–예측–제어가 연속적으로 이루어지는 점에서 현대적 디지털트윈의 정의와 일치한다. 해외에서는 지반 구조물의 해석 및 예측 관리를 목적으로, 불확실성을 고려한 디지털 트윈 개념이 적용되고 있다(Cotoarbă et al., 2025). 사면 분야에서는 물리 기반 해석과 계측 연계를 통해 강우 시 변위 및 간극수압을 실시간 보정하며 신뢰성 높은 예측을 수행하고 있으며, LiDAR 기반 DEM과 기상 예보, 머신러닝을 결합하여 실시간 붕괴 예측이 가능한 프레임워크가 제시되었다(Piciullo et al., 2025; Chen et al., 2023; Zhang et al., 2023; Liu et al., 2022; Hu et al., 2010). 터널 분야에서는 시공 전–중–후 전 주기에 걸쳐 지질 모델을 갱신하며 불확실성을 줄이는 절차가 제안되었고, 최근에는 확률론적 디지털트윈을 도입하여 불확실성을 정량적으로 통합하는 연구도 보고되고 있다(Wang et al., 2021). 또한 광산 및 수문 구조물에서는 LiDAR, 항공영상, InSAR을 통합하여 변형 조기 탐지 및 위험 대응을 자동화한 시스템이 구축되고 있다(Contreras et al., 2023; AECOM, 2022; Gao et al., 2021). 반면 국내에서는 디지털트윈 기술이 주로 공공 인프라 관리 및 재난 대응 중심으로 적용되어 왔다. 대표적으로 지하 공동구 디지털트윈 체계 제안(Jeong et al., 2021), 노후 공동구 화재·재난 대응 플랫폼 실증(Lee et al., 2025), 수자원 분야의 통합 물관리 플랫폼(Digital GARAM+) 구축(Kwon et al., 2022), 건축물 디지털트윈 데이터 모델의 상호운용성 연구(Jeong et al., 2024) 등이 수행되었으며, 최근에는 도심 지하공간 및 터널 계측 통합, 사면 및 옹벽 원격 모니터링, 제방 운영 최적화 등으로 확장되는 추세이다. 또한 소규모 지하굴착을 대상으로 한 경량형 스마트 계측–클라우드–실시간 경보 시스템도 현장 검증 단계에 있다(Lee et al., 2025). 한편, 국내 연구는 여전히 데이터 수집과 관리, 재난 경보 중심의 시스템적 접근에 머물러 있으며, 계측 자료가 수치해석 모델의 물성 보정이나 거동 예측으로 연계되는 구조는 제한적이다. 특히, 실시간 계측 결과를 기반으로 모델을 갱신하고 안정성을 재평가하는 폐루프형 디지털 트윈 절차는 아직 체계적으로 정립되지 못한 상황이다. 이에 본 연구에서는 이러한 한계를 보완하기 위해 실제 지반 구조물 적용에 앞서, 모형 사면 및 옹벽을 대상으로 준실시간 동기화와 피드백이 가능한 디지털트윈 기반 안정성 평가 절차를 구축하고, 그 적용 가능성을 검증하고자 하였다. 이를 위해 LiDAR 기반 형상 계측, 수치해석 모델 구축, 물성 보정, 그리고 안전율 평가로 구성된 통합 절차를 제안하였으며, 이를 통해 계측–모델–보정–평가가 순환하는 지반 구조물용 디지털트윈 파이프라인을 실험적으로 구현하였다. 본 연구의 절차는 실험 수준에서 디지털트윈의 실질적 적용성을 입증함으로써, 향후 실제 사면 및 옹벽 구조물의 안정성 평가와 재해 저감 관리 기술로 확장 가능한 기반을 제공한다.
2. 지반 구조물 재해저감을 위한 디지털트윈 적용 제안
2.1 지반 구조물의 디지털트윈 제안
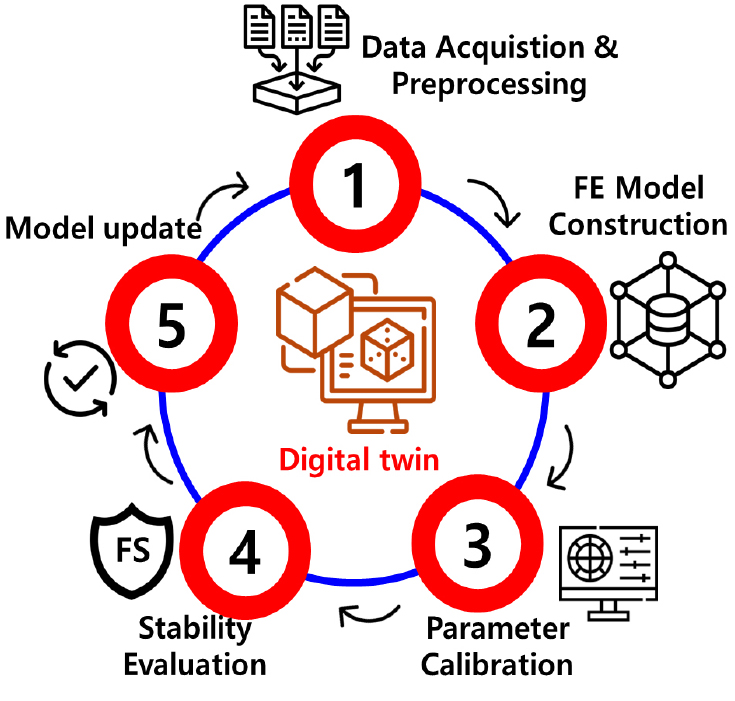
본 연구에서 제안하는 지반 구조물용 디지털트윈 프레임워크는 실험 계측 데이터를 기반으로 물리계와 가상계를 연동하여 구조물의 안정성을 정량적으로 평가하기 위한 절차적 체계로 구성된다. Fig. 2는 이러한 프레임워크의 전체 개념을 도식화한 것으로, 데이터 획득 및 전처리(Data Acquisition & Preprocessing), 유한요소 모델 구축(FE Model Construction), 물성치 보정(Parameter Calibration), 안정성 평가(Stability Evaluation), 그리고 모델 갱신(Model Update)의 다섯 단계로 순환되는 폐루프 구조를 가진다. 첫째, 데이터 획득 및 전처리 단계에서는 LiDAR 스캐닝과 계측 장비를 통해 형상과 거동 정보를 취득하고, 이를 해석 모델에 적용 가능한 형식으로 변환한다. 둘째, 유한요소 모델 구축 단계에서는 실측 형상을 반영하여 모델을 구성하고, 초기 물성치와 경계 및 하중 조건을 정의한다. 셋째, 물성치 보정 단계에서는 실측 변위와 해석 결과 간의 불일치를 최소화하기 위해 베이지안 최적화 기법을 적용하여 탄성계수, 내부마찰각, 점착력 파라미터를 자동으로 갱신한다. 넷째, 안정성 평가 단계에서는 보정된 물성을 반영한 모델에 SSR을 적용하여 단계별 FoS를 산정한다. 마지막으로, 모델 갱신 단계에서는 평가 결과를 바탕으로 해석 모델을 업데이트함으로써 계측–모델링–보정–평가가 순환하는 디지털트윈의 핵심 구조를 완성한다. 이와 같은 절차는 단순한 데이터 기반 해석을 넘어, 실험 계측과 수치해석을 유기적으로 통합함으로써 지반 구조물의 비선형 거동과 불확실성을 정량적으로 반영하는 데 초점을 두고 있다.
2.2 모델 구축 및 전처리
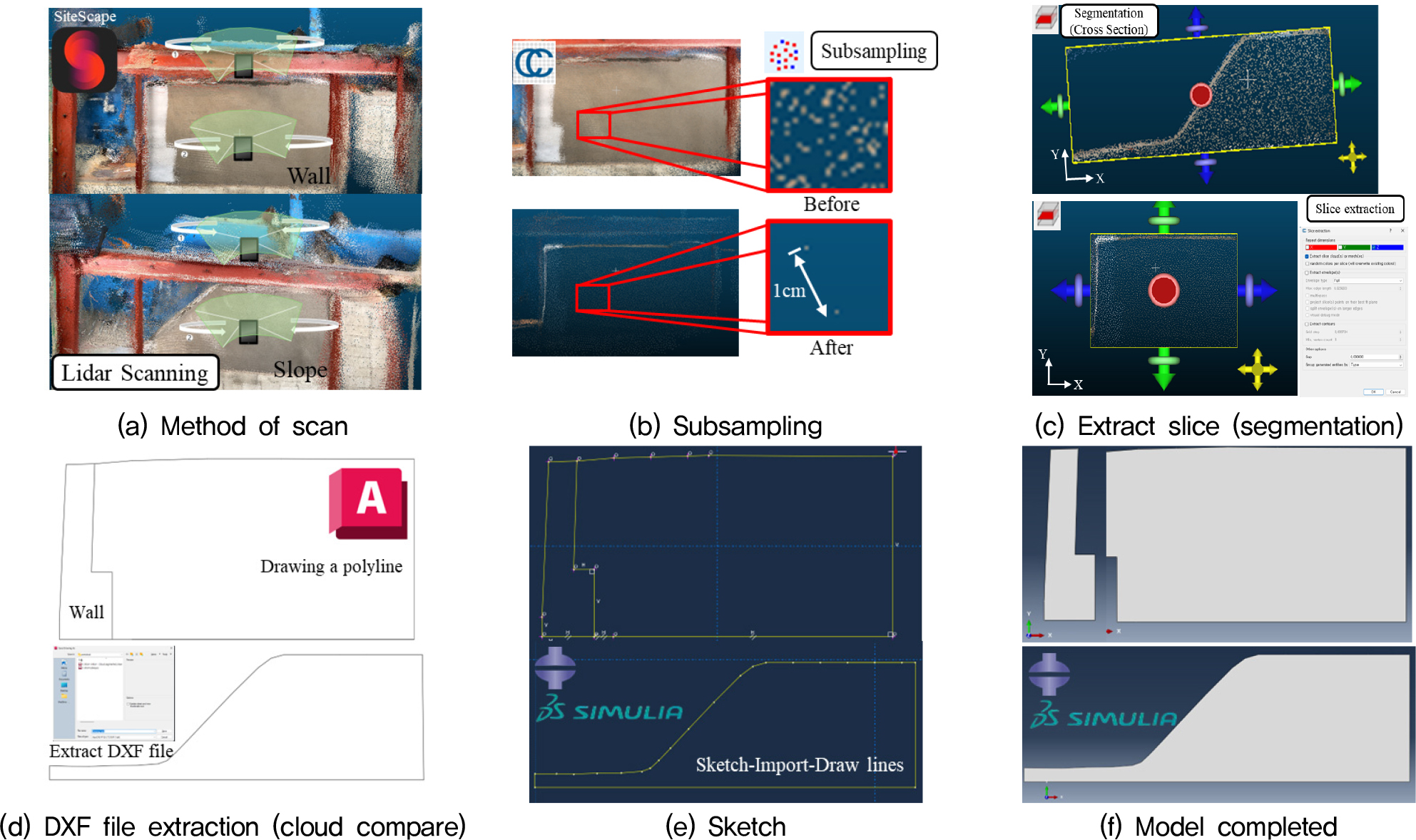
본 절에서는 디지털트윈 프레임워크의 첫 번째 구현 단계인 실제 형상을 해석 모델로 변환하는 과정을 다루며, 본 연구에서는 LiDAR 기반 형상 계측 및 전처리 과정을 통해 수행하였다. 해석 모델은 모형 사면 및 옹벽의 실제 형상을 계측하고, 이를 전처리하여 2차원 단면 형상으로 환원한 뒤 CAD 환경에서 윤곽을 정제하고 유한요소 해석용 모델로 변환하는 과정을 통해 구축하였다. 형상 계측에는 iPad 기반 LiDAR를 사용하여 모형 구조물의 3차원 점군을 취득하였다. Fig. 3은 LiDAR 기반의 취득된 점군으로부터 2차원 해석 모델을 구축하기까지의 전처리 흐름을 정리한 것이다. Fig. 3b는 균일 간격 다운샘플링 결과를 나타낸다. 점군의 과도한 밀도를 줄이면서도 형상 정보를 최대한 보존하기 위해 CloudCompare의 Subsampling 기능을 활용하였다. 최소 점 간격을 1cm로 설정하였으며, 이는 모형 사면의 대표적 기하 특성과 해석 모델의 격자 해상도를 동시에 고려한 값이다. 그로 인해 전체 점 수가 약 5.11 백만 개에서 0.27 백만 개로 감소하여 원본 데이터 대비 약 94%의 용량을 절감하였다. 이어 Fig. 3c와 같이 단면 슬라이싱을 수행하여 3차원 점군으로부터 2차원 단면 윤곽을 추출하였다. Fig. 3d에서는 추출된 윤곽을 DXF 형식으로 변환하고 CAD에서 모델에 대한 폴리라인을 수동으로 연결하는 과정을 나타낸다. 옹벽의 경우 옹벽과 나누어서 폴리라인을 연결하여 재료 분할하였다. 마지막으로 Fig. 3f는 2차원 해석 모델을 완성한 결과를 나타낸다. 본 연구는 iPad 기반 LiDAR의 측정 오차(±5cm)를 고려할 때, 본 연구에서는 반복 갱신 기반 자동화보다는 초기 점군을 기준으로 단면 윤곽을 구축하는 절차가 변위 및 파괴 규모 판별에 더 신뢰적이라고 판단하여 이를 적용하였다.
2.3 유한 요소 해석 및 수치 모델 구축
2.2절에서 구축한 단면 형상(DXF 파일)은 Abaqus의 Sketch 모듈에 불러와 2차원 평면변형률 유한요소 모델로 구성하였다. 본 연구에서는 단순 설계치수 기반의 이상화 형상 대신, iPad LiDAR 스캐닝으로 확보한 실측 형상을 해석 형상으로 직접 반영하였다. 모형 지반은 Mohr-Coulomb 모델을 적용하였으며, 해석에 필요한 초기 물성치는 실내시험 결과를 기반으로 설정하였다. 즉, 단위중량 및 다짐 조건은 다짐시험(ASTM D698, 2012) 결과를 근거로 정의하였고, 전단강도정수(𝜑, ) 및 탄성 응답에 필요한 기본 파라미터는 삼축 압축시험(ASTM D7181-20, 2020) 결과를 참고하여 초기값으로 지정하였다. 옹벽 및 가압판은 선형탄성체로 모델링하고, 해석 입력값은 Table 1에 정리하였다. 상재하중은 플레이트를 통해 단계적으로 재하되며, 전체 모델에는 자중(gravity)을 함께 고려하였다. 경계 조건은 토조 하부를 고정(fixed)하여 수직 및 수평 변위를 제한하고, 측벽은 수평 방향만 구속한 롤러(roller) 조건으로 설정하였다. 요소는 4절점 평면변형률 요소(CPE4)를 사용하였으며, 반복 해석(보정–SSR) 과정의 일관성을 확보하기 위해 균일 요소 크기 기반의 메쉬를 적용하였다. 해석에 사용된 재료 물성 및 주요 해석 조건은 Table 1에 제시하였다.
Table 1.
Mechanical properties applied to the analysis
2.4 물성치 추정 및 보정 알고리즘
지반 구조물의 디지털트윈 구축 과정에서 물성치 보정은 실측 변위의 오차를 최소화하여 모델의 신뢰성을 확보하기 위한 핵심 단계이다. 기존 연구에서는 사면 안정 해석 시 주로 전단강도정수를 주요 변수로 설정하여 역해석이 수행되어 왔으며(Ju et al., 2025; Xu and Zhang, 2025; Zhang et al., 2010), 변수 간 상관성을 고려하기 위한 다양한 보정 기법이 제안되어 왔다. Calvello and Finno(2004)은 민감도 분석을 통해 영향도가 높은 변수만을 선택적으로 보정하는 것이 효율적임을 제시한 바 있다. 본 연구에서는 우선 민감도 분석을 수행하여 주요 보정 변수를 도출하였으나, 초기 단계에서 특정 변수의 편향 수렴이 관찰되었다. 이에 따라 Gaussian Process(GP) 기반 Bayesian Optimization(BO) 을 도입하여 탐색의 균형성과 효율성을 향상시켰다. BO는 총 40회의 반복(초기 8회 랜덤 탐색 및 32회 최적화)으로 수행되었으며, 변수 조합(2~3개)에 대해 30회 이상 탐색 시 수렴 경향이 확인되어 반복 횟수를 설정하였다. 최적화 과정에서 해가 변수 경계로 수렴하는 문제를 방지하기 위해 정규화 항(𝜆)과 경계 페널티 계수(𝛽)를 포함한 목적함수를 구성하였다. 목적함수는 실측 변위와 해석 변위 간의 Root Mean Square Error(RMSE) 로 정의하였으며, 식 (1)과 같다.
여기서 θ = {, 𝜑, }는 보정 변수 벡터이다. 정규화 및 경계 페널티를 고려한 최종 목적함수는 식 (2) 다음과 같이 정의된다.
여기서 는 초기값 기준 오차, 는 탐색 변수의 정규화 항이며, 는 변수의 경계 조건 위반 시 1로 적용되는 페널티 함수이다. 본 연구에서는 𝜆=0.5, 𝛽=20으로 설정하였으며, 𝛽가 10 이하일 경우 경계 수렴이 잦고, 20 이상에서는 탐색이 중간 영역에서 안정적으로 수렴하는 것으로 확인되었다. 탐색 효율성 향상을 위해 BO의 획득함수로 기대개선(Expected Improvement, EI)을 적용하였으며, 이는 식 (3)으로 정의된다.
여기서 는 현재까지 관측된 최소 목적함수 값, 𝜇(𝜃)와 𝜎(𝜃)는 GP 예측의 평균과 표준편차, 𝛷와 𝜑는 각각 표준정규분포의 누적분포함수(CDF)와 확률밀도함수(PDF)이다. EI가 최대가 되는 지점에서 새로운 후보 물성치가 선택되고, 이에 대한 Abaqus 해석 결과가 GP 모델에 반영되는 방식으로 반복 수행되었다. 본 알고리즘은 Python–Abaqus 연동 환경에서 구현하여 실측 변위와 해석 변위 간 RMSE를 자동 계산하고, 이를 최소화하는 방향으로 , 𝜑, 를 갱신하였다. 따라서 본 절에서 도출된 물성치는 변위 보정 과정에서 추정된 파라미터이며, 2.5절에서는 보정된 물성치를 입력값으로 SSR을 수행하여 하중 단계별 FoS를 평가하였다.
2.5 전단강도 저감법
전단강도 저감법(Shear Strength Reduction, SSR)은 사면 및 옹벽의 안정 해석에서 안전율을 산정하기 위한 대표적인 수치해석 기법이다. 전통적으로 Bishop, Janbu, Fellenius와 같은 LEM이 사용되어 왔으나, 최근에는 수치해석 기반의 FEM–SSR 기법이 널리 활용되고 있다. SSR의 기본 개념은 지반의 전단강도정수인 점착력과 내부마찰각을 저감 계수(SRF, Strength Reduction Factor)에 따라 점진적으로 감소시키며 해석을 반복 수행하고, 더 이상 해석이 수렴하지 않는 단계에서의 SRF를 안전율로 정의한다(Dawson et al., 1999). 강도 저감은 다음과 같이 표현된다.
여기서 는 저감된 점착력과 내부마찰각, SRF는 안전율을 의미한다. SSR 해석을 구현하는 방법에는 두 가지가 있다. 첫째, Field 변수 기반 방법으로, Abaqus의 Field 기능을 활용하여 SRF 값 변화에 따라 물성이 자동으로 갱신되도록 설정하는 방식이다. 이 방법은 해석 효율성이 높으나, 수렴 실패 시 강도저감 단계와 물성값 간의 대응 관계를 명확히 추적하기 어렵다는 단점이 있다. 둘째, 수동 갱신 방법으로, 단계별로 SRF 값을 증가시키고 그에 맞추어 저감된 점착력과 내부마찰각을 직접 갱신하여 해석을 반복하는 방식이다. 이 방법은 계산 시간이 다소 증가하더라도, 각 단계별 물성치와 해석 결과를 1:1로 대응시킬 수 있어 안전율을 안정적으로 도출할 수 있다. 본 연구에서는 수동 갱신 방법을 채택하였다. 해석은 SRF = 1.0을 기준으로 시작하여 0.1 간격으로 증가시켜 0.5~10 범위에서 수행하였다. 각 단계에서 식 (4)에 따라 와 𝜑를 갱신하였으며, 해석이 수렴하지 않는 시점의 SRF 값을 해당 사면 및 옹벽 모델의 안전율로 정의하였다. 즉, 사면 및 옹벽 정부에서 전단파괴로 인한 변위가 급격히 발산하는 지점을 안전율로 간주하였다.
3. 모형지반 구조물에 대한 개념 적용
3.1 모형 실험 개요
본 연구에서는 제안된 디지털트윈 절차의 적용 가능성을 검증하기 위하여 사면과 블록식 옹벽을 대상으로 축소 모형실험을 수행하였다(Fig. 4). 실험은 전면이 아크릴로 제작된 대형 토조(135cm × 60cm × 33cm)에서 진행되었으며, 구조물의 변형 거동을 다양한 계측 기법을 통해 정량적으로 분석하였다. 모형 지반은 ASTM D2487-17(2017)에 따라 불량한 모래(SP)로 분류되는 사질토를 사용하였고, 시료는 함수비 3% 조건에서 상대밀도 30%를 모사하여 지반을 조성하였다. DIC 촬영을 위해 일부 모래입자를 흑색으로 염색하였으며, 분석은 Shin and Yoo(2024)의 방법과 동일하게 수행하였다. 내부마찰각은 삼축압축시험 결과 약 22°로 산정되었고, 단위중량은 다짐시험을 통해 결정하였다. 모형 옹벽은 실제 블록식 옹벽의 축소 모형으로, 3D 프린터(PLA 소재)를 이용하여 제작하였다. 하부 블록은 16.5cm × 15.2cm × 4.57cm, 상부 블록은 16.5cm × 10.3cm × 4.57cm 크기로 제작하였으며, 총 10층(하부 4층, 상부 6층)으로 적층하였다. 각 블록 간에는 전단 키를 삽입하여 구조적 일체성을 확보하였고, 실제 옹벽의 단위중량을 모사하기 위하여 블록 내부를 모래로 충전하였다. 실험의 상사 조건은 기하학적 길이비 1:10, 단위중량비 1:2로 설정하였으며, 차원해석법을 통해 시간 상사비를 약 1:3.16으로 도출하였다. 이러한 상사법칙 적용은 축소 모형의 거동을 원형 구조물에 해석적으로 환산할 수 있도록 하기 위함이다(Table 2). 계측 시스템은 iPad 기반 LiDAR를 이용한 3차원 스캐닝, DIC, 레이저 변위계, LVDT, 하중계로 구성하였다. 사면의 수평변위 측정을 위해 사면의 시작점부터 수직 높이 방향으로 12cm 간격의 세 지점에 레이저 변위계를 설치하여 측정하였고, 옹벽은 하부 16cm 지점에서 시작하여 13.5cm 간격으로 설치하였다. 가압판 양측에는 LVDT를 배치하여 수직 변위를 측정하였으며, 하중 조건은 정적 수직 재하(Static vertical loading)로 설정하였다. 사면 및 옹벽 배면의 정부로부터 30cm 이격된 위치에 가압판을 설치하고, 10N/s의 속도로 파괴 직전까지 재하하였다. 레이저 변위계와 LVDT, DIC는 1 Hz로, 하중계는 10Hz로 데이터를 취득하였다. 또한 LiDAR 스캐닝은 실험 수행 이전에 실시하여 형상 정보를 확보하였으며, 본 모형실험에서는 포인트 클라우드와 변위, DIC 데이터를 동일 조건에서 통합적으로 획득하였다.
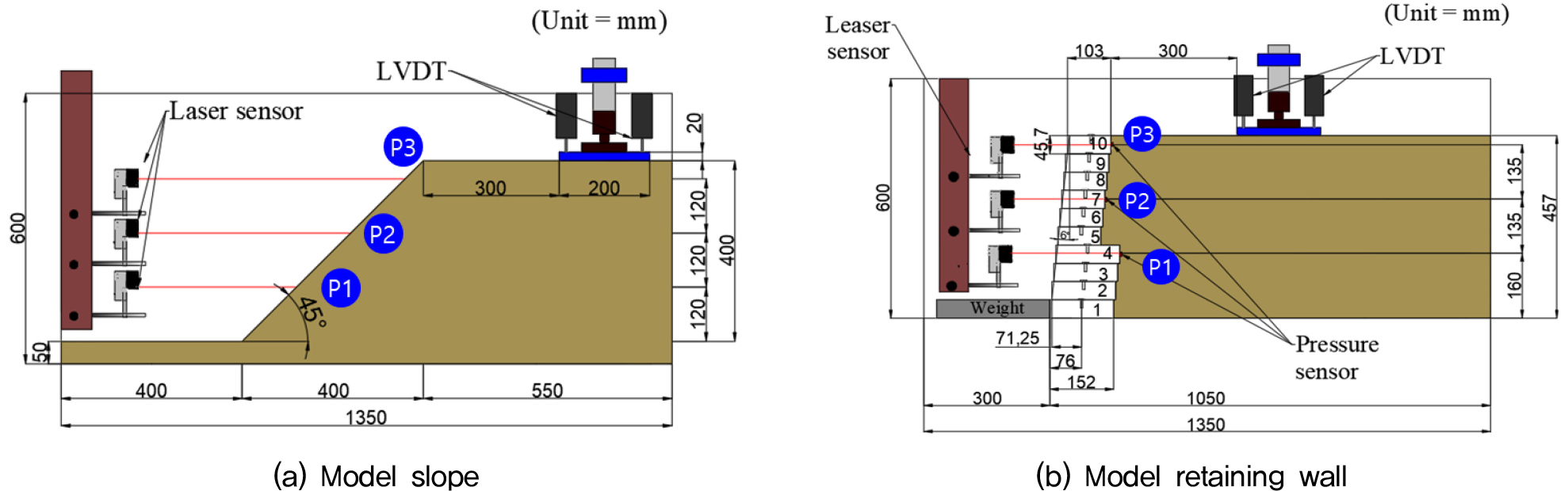
Table 2.
Similitude-based scaling ratios
| Name | Symbol | MLT | Similarity ratio |
| Length | L | [L] | 1: 10 |
| Weight | M | [M] | 1: 2000 |
| Time | t | [T] | 1: 3.16 |
| Acceleration | g | [LT-2] | 1:1 |
| Unit weight | 𝛾 | [ML-2T-2] | 1:2 |
3.2 디지털트윈 절차 적용
Fig. 5는 3.1절의 모형 사면 및 옹벽 실험을 대상으로 계측–전처리–모델링–보정–SSR–평가로 이어지는 디지털트윈 파이프라인과 데이터 흐름을 나타낸 것이다. 본 파이프라인은 실험에서 취득되는 계측 및 형상 데이터를 해석 모델에 자동 연계하여 물성 보정과 안정성 평가를 반복 수행함으로써, 실험 단계별 거동 변화가 안전율에 미치는 영향을 정량화하였다. 먼저 실험 단계에서 하중–변위 계측과 동시에 iPad 기반 LiDAR로 사면 및 옹벽 형상을 스캔하고, 계측된 하중·변위 자료는 이후 보정에 활용할 수 있도록 Excel 형식으로 정리하였다. 해석 모델은 2.2절에서 구축한 LiDAR 기반 2차원 단면 모델을 사용하였으며, 이때 사면 경사와 옹벽 블록의 기하학적 형상을 그대로 반영하고 앞서 산정한 사질토 및 PLA 블록의 기초 물성, 경계·하중 조건을 함께 입력하였다. 초기 수치해석 단계에서는 Fig. 5의 결정론적 해석(Deterministic analysis)에 해당하는 해석을 수행하였다. 즉, 보정 전 물성치를 고정한 상태에서 상재하중을 단계별로 증가시키며 해석을 수행하고, 각 하중 단계에서 센서 위치에 대응하는 절점의 수평변위를 추출하여 실험에서 계측된 수평변위와 비교하였다. 두 결과 간 차이는 평균제곱근오차(RMSE)로 정량화하였다. 오차가 허용 기준을 만족하지 못하는 경우 Fig. 5 중앙의 “comparison(measured vs. model)” 단계에서 보정 루프가 작동하도록 Python–Abaqus 연동 환경을 구축하였고, Bayesian optimization을 도입하여 탄성계수, 내부마찰각, 점착력을 탐색 변수로 설정한 후 초기 8회 무작위 탐색과 32회 Gaussian process 기반 탐색을 통해 단계별 변위 차이가 최소가 되도록 물성치를 반복적으로 갱신하였다. 각 후보 물성치 조합에 대해서는 Abaqus 해석이 자동 실행되고, Python이 해석 결과를 불러와 RMSE를 재계산하여 GP 모델에 반영하는 방식의 피드백 구조를 구현하였으며, 보정 루프가 수렴 기준을 충족하면 해당 물성치를 디지털트윈 모델의 최종 물성으로 확정하였다. 이후에는 보정된 물성치를 기반으로 SSR 해석을 수행하였고, 2.5절에서 제시한 절차에 따라 강도정수를 일정 비율씩 점진적으로 감소시키며 반복 해석을 수행한 뒤 해석이 더 이상 수렴하지 않는 임계 단계에서 FoS를 산정하였다. 본 파이프라인은 계측 데이터 입력 후 해석–보정–SSR–평가가 자동으로 연계되도록 구현되었으나, 계산 시간이 수반되므로 엄밀한 의미의 실시간 처리라기보다 준실시간 자동 갱신 기반 안정성 평가 절차로 정의된다. 본 연구의 계산 환경에서 하중 단계 1회당 BO는 약 30분, SSR은 약 37분이 소요되어, 단계별 안정성 재평가까지 약 1시간 내외의 갱신 주기를 갖는다. 이와 같은 일련의 과정에 의해 실험 단계마다 취득된 형상 및 거동 정보가 해석 모델에 순환적으로 반영되고, SSR 기반 안정성 평가까지 자동으로 연결되는 디지털트윈 절차가 구현하였다.
4. 적용 결과 및 안정성 검증
4.1 변위 보정 결과
제안된 디지털트윈 프레임워크의 적용성을 검증하기 위하여, 보정 전·후의 수치해석 결과를 실측 데이터와 비교하였다. Fig. 6은 사면과 옹벽의 지점별 하중–수평변위 관계를 나타낸 것으로, Fig. 6a의 사면 결과에서는 수직하중이 100kPa 지점에 수평변위 20mm에서 사면 파괴가 발생하였는데, 보정 전 해석이 수직하중이 약 70kPa 이상 고하중 구간에서 실측 결과와 현저한 차이를 보였다. 예를 들어, 90kPa에서 보정 전 해석의 수평변위는 실측값과 큰 차이를 보였으나, 보정 후에는 실측값에 근접하면서 실측 대비 변위 오차가 약 92% 감소하였다. 이는 보정 과정에서 탄성계수 및 전단강도정수가 실제 거동에 부합하도록 조정된 결과로 해석된다. Fig. 6b는 모형 옹벽의 결과를 나타내며, 수직하중이 약 50kPa에 도달하면 옹벽 전면부에서 파괴가 발생하였다. 파괴 이전 하중 구간을 비교해 보면, 보정 전 해석은 전반적으로 수평변위를 과소평가하여 실측 값과 큰 차이를 보이는 반면, 보정된 해석은 하중 증가에 따라 실측 곡선에 점차 수렴하며 최대 오차가 약 0.2mm 이내로 감소하는 경향을 보인다. 이는 제안된 보정 절차가 모형 옹벽의 파괴 이전 거동을 정량적으로 개선된 정확도로 재현할 수 있음을 보여준다. 다만 향후 실제 구조물 적용을 위해서는 파괴 직전 구간과 현장 경계조건을 포함한 추가 검증이 필요하다. Table 3는 각 계측 지점(Point)별 보정 전후의 RMSE 변화를 정리한 결과이다. 사면부의 경우 보정 전 평균 RMSE는 약 11mm 수준이었으나, 보정 후에는 약 1mm 내외로 감소하여 약 87%의 평균 오차 저감효과를 보였다. 특히 P2 지점에서 약 91%로 가장 높은 감소율을 나타내었으며, 이는 Bayesian Optimization 기반 보정 과정에서 탄성계수와 전단강도정수가 실제 거동에 부합하도록 효율적으로 조정된 결과로 해석된다. 반면 옹벽부는 초기 변위 자체가 작아 RMSE 감소폭이 상대적으로 작았으며, 약 17~52% 수준의 저감 효과를 보였다. 결과적으로 Table 3는 제안된 보정 기법이 사면부 변위 예측 정확도를 크게 향상시키며, 제안된 보정 절차가 모형사면 및 옹벽의 비선형 거동 경향을 합리적으로 재현할 수 있음을 보여준다. 본 연구에서 제시한 RMSE는 iPad LiDAR 기반 형상 계측과 물성·경계 조건 설정에 수반된 불확실성을 함께 반영한 값이므로, 절대값 자체보다는 보정 전·후 오차 감소율과 거동 재현 정도에 중점을 두어 해석할 필요가 있다.
Table 3.
RMSE results for each point
| Point | Slope | Wall | ||||
| Before | After | Reduction | Before | After | Reduction | |
| P1 | 10.566 | 1.926 | 82% | 0.337 | 0.162 | 52% |
| P2 | 11.088 | 1.001 | 91% | 0.316 | 0.194 | 39% |
| P3 | 11.567 | 1.425 | 88% | 0.300 | 0.248 | 17% |
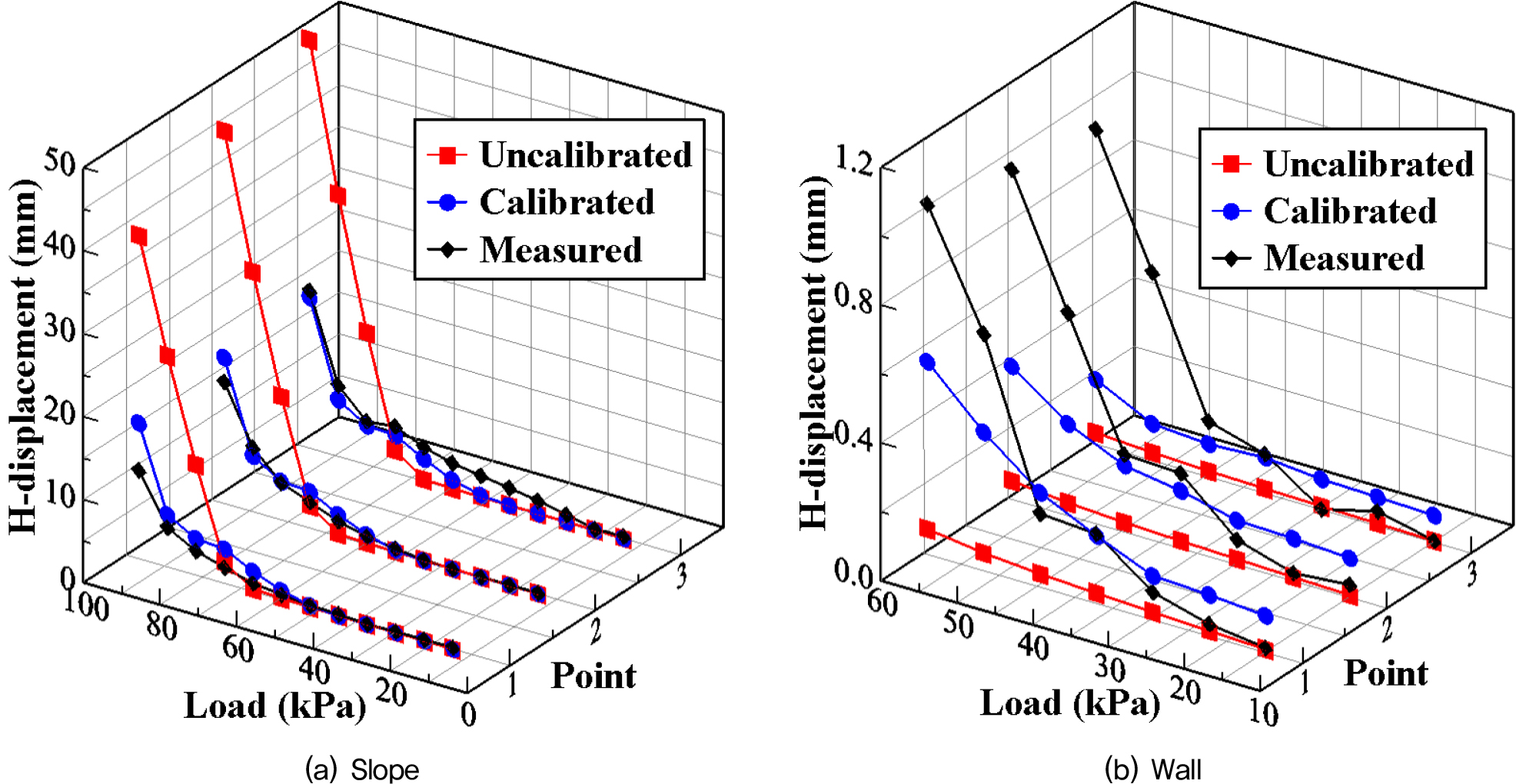
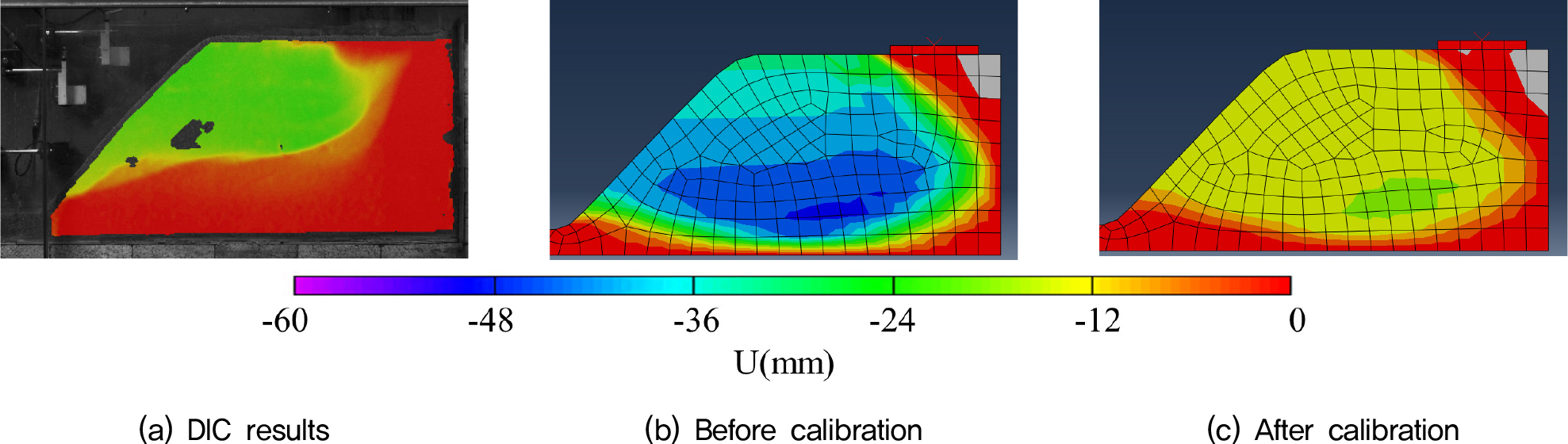
Fig. 7은 모형 사면의 파괴 직전 단계에서 DIC 결과와 해석 결과(보정 전·후)의 변위 분포를 비교한 칸투어이다. 보정 전 해석(Fig. 7b)은 사면 중앙부에 변형이 과도하게 집중되는 양상을 보이며, 사면부 전단대에서의 최대 수평변위를 35mm로 과대 해석하여 DIC 결과(Fig. 7a, 19mm)와 큰 차이를 나타냈다. 반면 보정 후 해석(Fig. 7c)은 중앙부 과도 집중이 완화되고, 전단대의 형성 위치와 변위 규모가 DIC에서 관찰된 변형 집중대와 보다 일관되게 나타났으며, 사면부 최대 수평변위도 15mm로 감소하였다. 즉, 보정 적용으로 사면부 최대 수평변위가 보정 전 대비 약 57% 감소하였고, DIC 대비 최대변위 오차 역시 16mm에서 4mm로 감소(약 75% 저감)하여 실험–해석 간 불일치가 정량적으로 크게 축소되었다. 이는 Bayesian Optimization 기반 보정이 사면부 변형의 전단대 형성과 변위수준을 동시에 개선하여, 보정된 모델의 변위 정확도를 향상시켰음을 보여준다. 본 연구에서 모형실험 조건에서 관측된 파괴 이전 변위 응답과 변형 집중대의 일치도를 기준으로 정의된다. 따라서 4.2절에서는 4.1절에서 확보된 보정 물성치(, 𝜑, )를 입력값으로 SSR을 수행하여, 변위 보정 결과가 안전율 평가로 일관되게 연결되는지를 검증하였다.
4.2 안전율 검증
Fig. 8은 보정된 물성치를 이용하여 SSR 기법으로 산출한 안전율을 외부 프로그램의 LEM 결과와 비교한 것이다. 탄성체로 단순 모델링된 옹벽의 경우, LEM에 적용이 불가능하여 비교 대상에서 제외하였으며, 사면부에 대해서만 프로그램 Hyrcan 2.0을 이용하여 LEM 결과를 산출하였다. 그 결과, SSR과 LEM을 통해 얻은 사면의 안전율은 전반적으로 유사한 경향을 보였으며, 이는 제안된 보정–해석 절차를 통해 산정된 물성치가 기존 한계평형법 기반 해석에서도 타당하게 적용될 수 있음을 의미한다. 다만 고하중 단계에서 사면의 파괴가 발생한 이후에는 SSR 해석에서 FoS가 다소 증가하는 경향이 관찰되었는데, 이는 파괴 후 모델의 국부적 강성 손실 및 수치적 불안정성에 기인한 것으로 판단된다. Table 4는 사면에 대해 상재하중에 따른 재료 물성치 변화를 다항식 회귀(Polynomial regression)로 근사한 결과를 나타낸다. 본 연구는 현장 적용 시 계측 업데이트에 따라 물성 갱신과 안정성 평가가 반복 수행될 수 있음을 고려하여, 계산 비용이 작고 구현이 단순한 다항식 회귀를 채택하였다. 제안한 회귀식은 제한된 데이터에서도 하중 변화에 따른 , 𝜑, 의 연속적 경향을 간결하게 표현할 수 있으며, 계측 기반 갱신 루프에서 신속한 예측 입력값 생성에 유리하다. 또한 임계응력(Critical stress)을 기준으로 회귀 적용 범위를 설정하여, 파괴 이후 등 물성의 물리적 의미가 약화될 수 있는 구간의 외삽을 방지하도록 구성하였다. 따라서 본 회귀 모델은 디지털트윈 안정성 평가에서 계측 자료를 기반으로 한 물성 업데이트를 효율화하는 보조 모델로 활용될 수 있다.
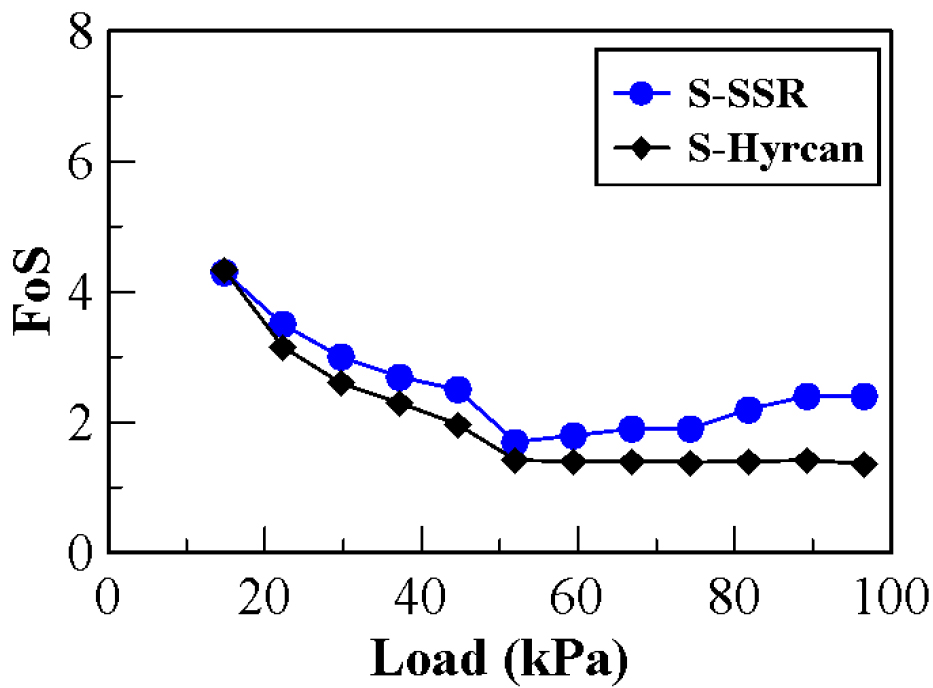
Table 4.
Regression models for material properties as a function of applied stress
| Case | Variable | Threshold stress (Pa) | Regression model |
| Slope | 10,404 | ||
| 𝜑 | |||
| Wall | 5,945 | ||
| 𝜑 | |||
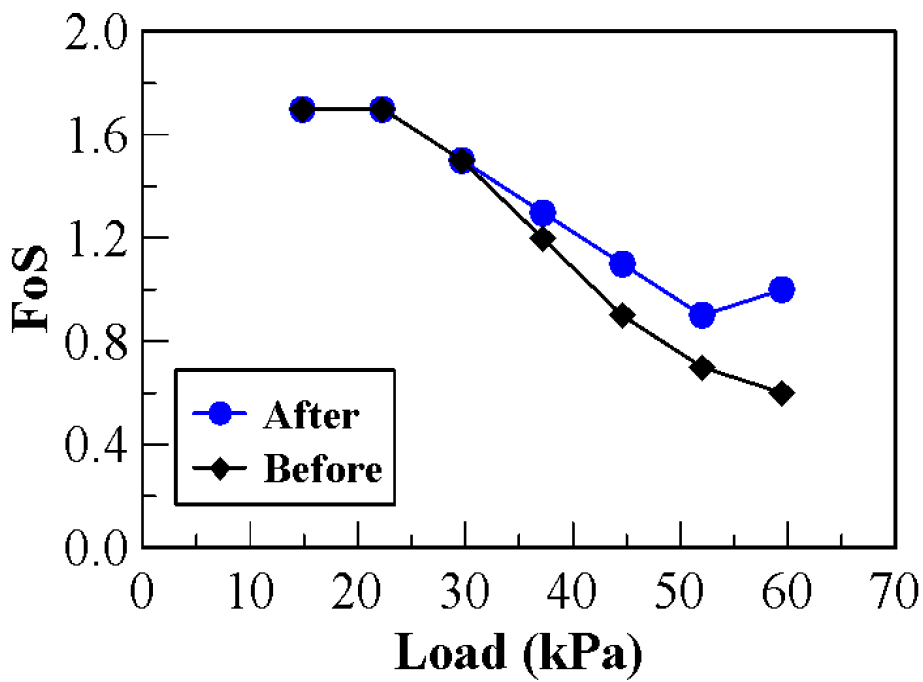
Fig. 9는 옹벽 모델에 대해 보정 전과 보정 후의 하중–안전율 관계를 비교한 결과를 나타낸다. 보정 후 모델은 Bayesian Optimization을 통해 탄성계수 및 전단강도정수가 상향 조정되었으며, 이에 따라 동일 하중 조건에서의 안전율이 전반적으로 증가하는 경향을 보였다. 특히 20~40kPa 구간에서 보정 전 모델은 안전율이 급격히 저하되는 반면, 보정 후 모델은 완만한 감소를 나타낸다. 이러한 결과는 보정 과정에서 실측 거동을 반영한 물성치가 해석 모델의 강성을 개선시켜, 모형의 실제 거동에 보다 근접한 안정성 평가를 가능하게 했음을 의미한다.
5. 결 론
연구는 실제 지반 구조물 적용에 앞서, 모형 실험을 통해 디지털트윈 기반 안정성 평가 절차의 타당성을 검증하는 것을 목적으로 수행되었다. 이를 위해 iPad LiDAR를 이용한 포인트 클라우드 스캐닝, CloudCompare–AutoCAD를 이용한 전처리 및 모델 구축, Abaqus–Python 연동을 통한 Bayesian Optimization 기반 물성 보정, 그리고 SSR 해석을 통한 안전율 산정까지의 일련의 절차를 통합하였다. 이러한 절차를 모형실험 수준에서 폐루프 형태로 구현함으로써, 지반 구조물 디지털트윈 구축의 핵심인 준실시간 보정–평가의 연속성을 실험적으로 입증하였다. 주요 결론은 다음과 같다.
1)iPad LiDAR를 활용하여 모형 사면의 형상을 정밀하게 스캔하고, CloudCompare–AutoCAD를 이용한 전처리(노이즈 제거, 다운샘플링, 슬라이싱, DXF 변환)를 거쳐 2차원 해석 모델을 구축하였다. 이러한 일련의 절차를 통해 점군 기반의 모델을 구축할 수 있었으며, 실제 모형 사면 형상을 재현할 수 있었다. 결과적으로, LiDAR–전처리–DXF–해석 모델 구축까지의 절차를 동일한 워크플로로 반복 수행할 수 있음을 확인하였다.
2)Python–Abaqus 연동을 통한 베이지안 최적화는 사면과 옹벽의 보정 대비 변위 차를 두드러지게 감소하였다. 특히, 사면의 경우 RMSE가 80% 이상 감소되며, 보정 전 대비 효과적으로 개선하였다. 또한 BO–SSR 절차가 하중 단계 1회 기준 BO 약 30분, SSR 약 37분 소요되는 자동 폐루프 형태로 구현됨을 보였으며, 이를 통해 준실시간 갱신 기반의 안정성 평가 가능성을 확인하였다.
3)보정된 모델에 SSR을 적용해 하중 단계별 FoS를 자동 산정하였고, 외부 해석(Hyrcan)과 추세 일치를 확인하였다. 이를 통해 보정–평가가 연속 순환하는 디지털트윈 폐루프가 실험 수준에서 유효함을 입증하였다.
4)제안 절차는 계측 업데이트에 따라 모델 파라미터를 반복적으로 갱신하고 안전율을 즉시 재평가할 수 있어, 현장 모니터링–경보–의사결정 지원으로의 확장이 가능하다. 즉, 센서–모델–평가의 표준화된 파이프라인을 운영함으로써 실제 사면 및 옹벽의 유지관리에서 실질적 도구로 기능할 것으로 기대된다.
본 연구는 계측–모델링–보정–안정성 평가가 연속적으로 동작하는 지반 구조물용 디지털트윈 파이프라인을 모형실험에 실증했으며, 실제 사면 및 옹벽 현장 적용을 위한 기초 프레임워크를 제시하였다. 다만 본 연구는 모형 규모와 제한된 하중 범위에 국한되며, iPad LiDAR기반 형상 불확실성이 여전히 존재함으로, 향후 대형 실험 및 현장 데이터 반영, LiDAR의 정량적 민감도 분석, 3차원 모델링까지의 확장이 필요하다.
